

Three-dimensional splicing matching point selecting method based on global calibration constraint
A matching point and global technology, which is applied in the field of computer vision and image measurement, can solve the problems affecting the splicing speed and achieve the effect of improving the speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
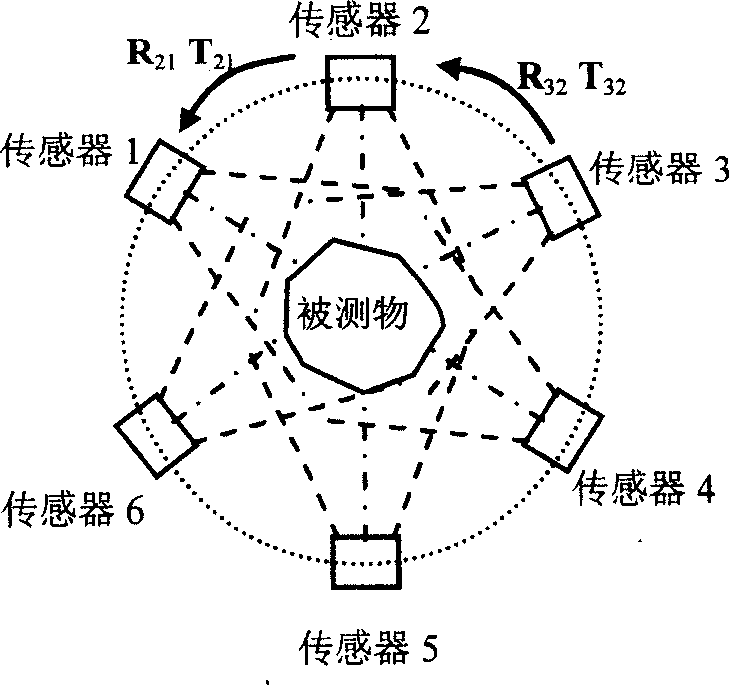
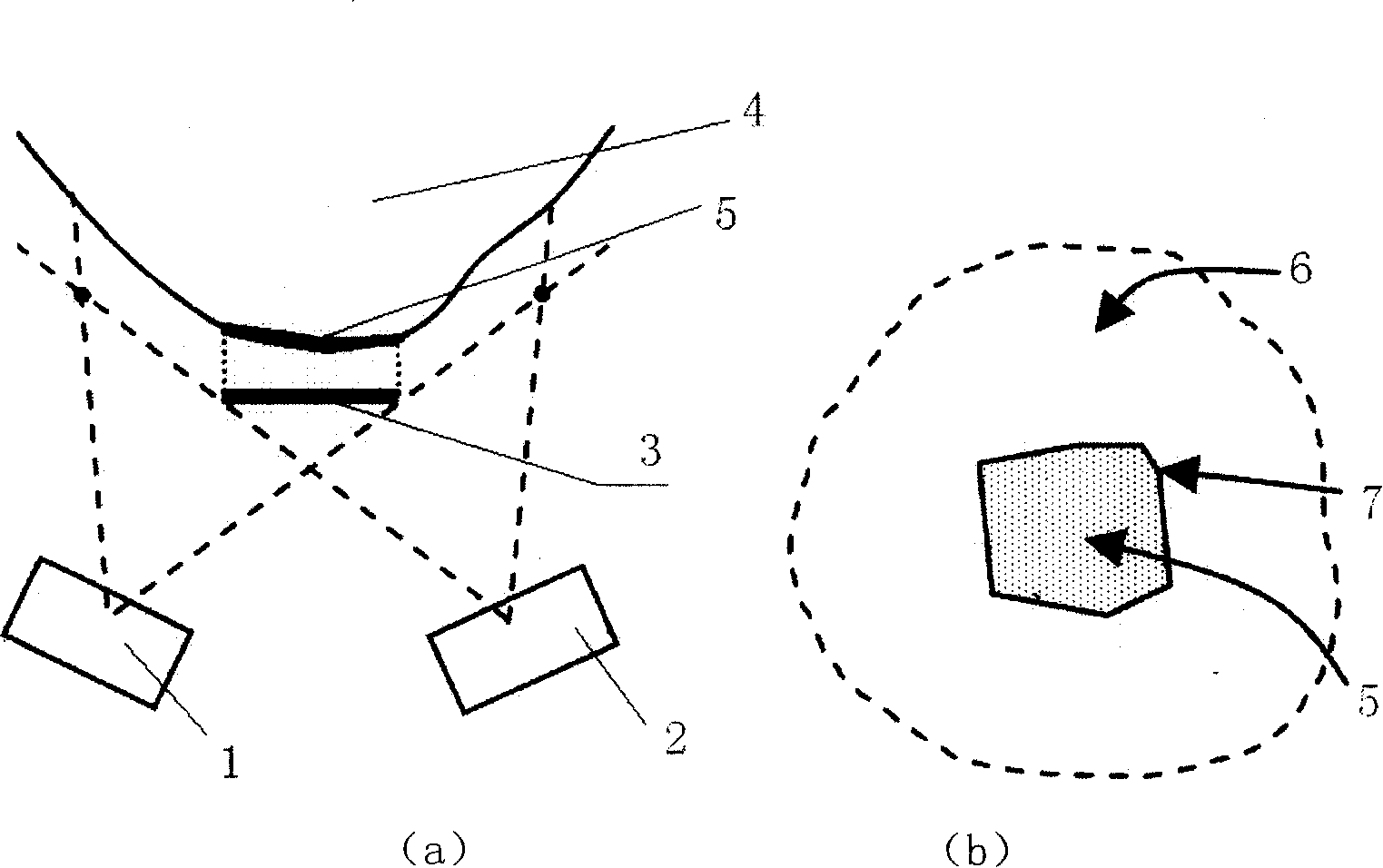
[0028] When performing global calibration on multiple sensors, it is necessary to calibrate the coordinate transformation matrices R and T between the sensor systems with the help of targets, figure 1 It is a schematic diagram of the multi-sensor panorama measurement system. like figure 2 As shown in (a) and (b), take the global calibration of a planar target as an example, the calibration target 3 is the adjacent sensor, that is, sensor 1 and sensor 2, the overlapping area 5 of the visible range, constrained by the measurement depth of field, the measured Part of the object 4 must be close to and within the range covered by the target, so it belongs to the overlapping area 5 of the measurement data and can be used by the three-dimensional stitching algorithm. 6 in the figure is the projected area of the measured object, and 7 is the targ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More