

Digital PID control method
A control method and digital technology, which can be used in electric controllers, controllers with specific characteristics, etc., and can solve problems such as zero-position drift in the differential link.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
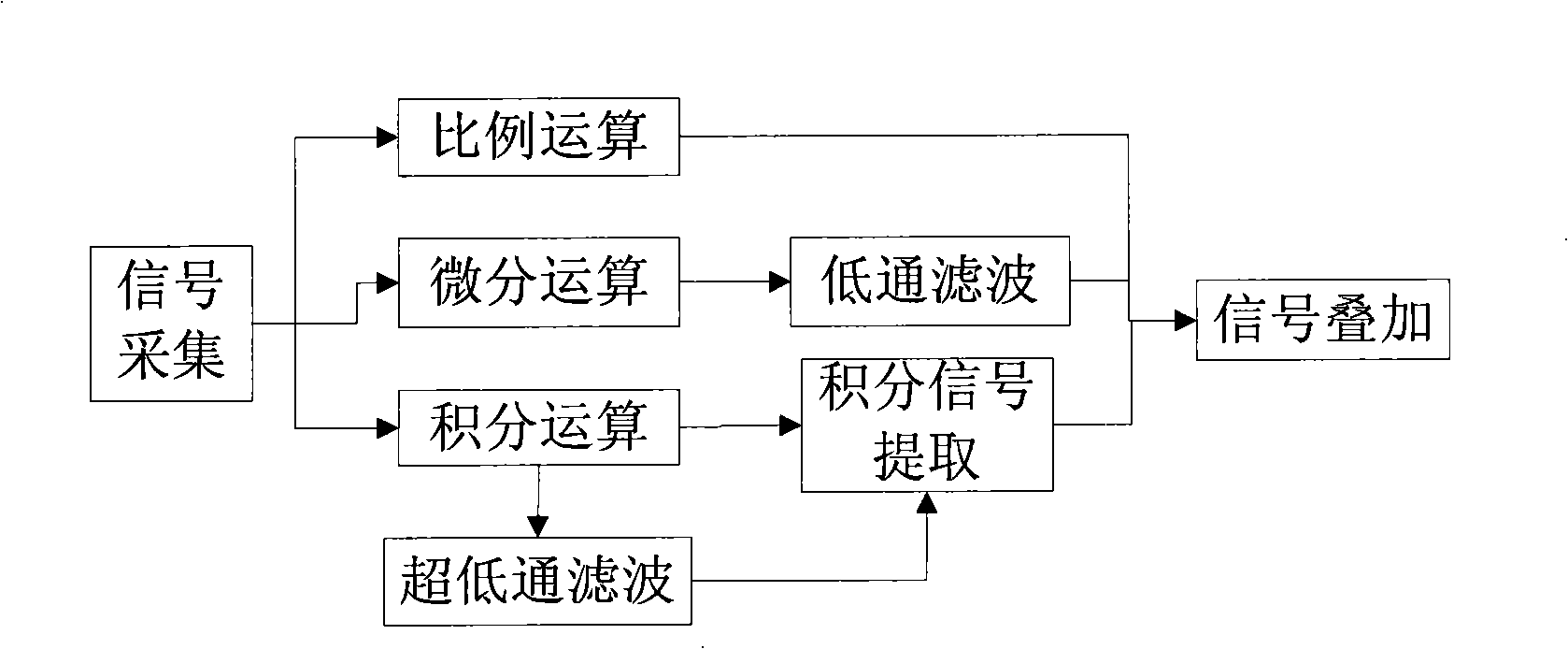
[0049] The present invention is described in more detail below in conjunction with accompanying drawing example:
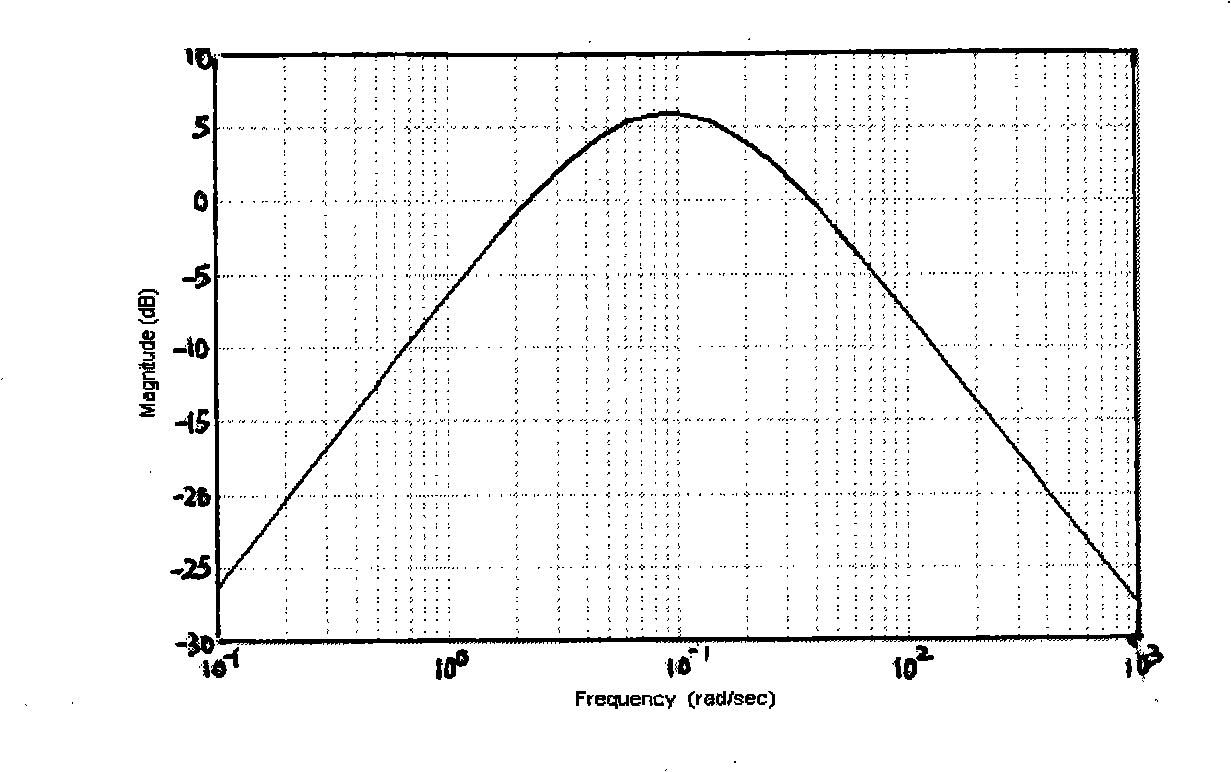
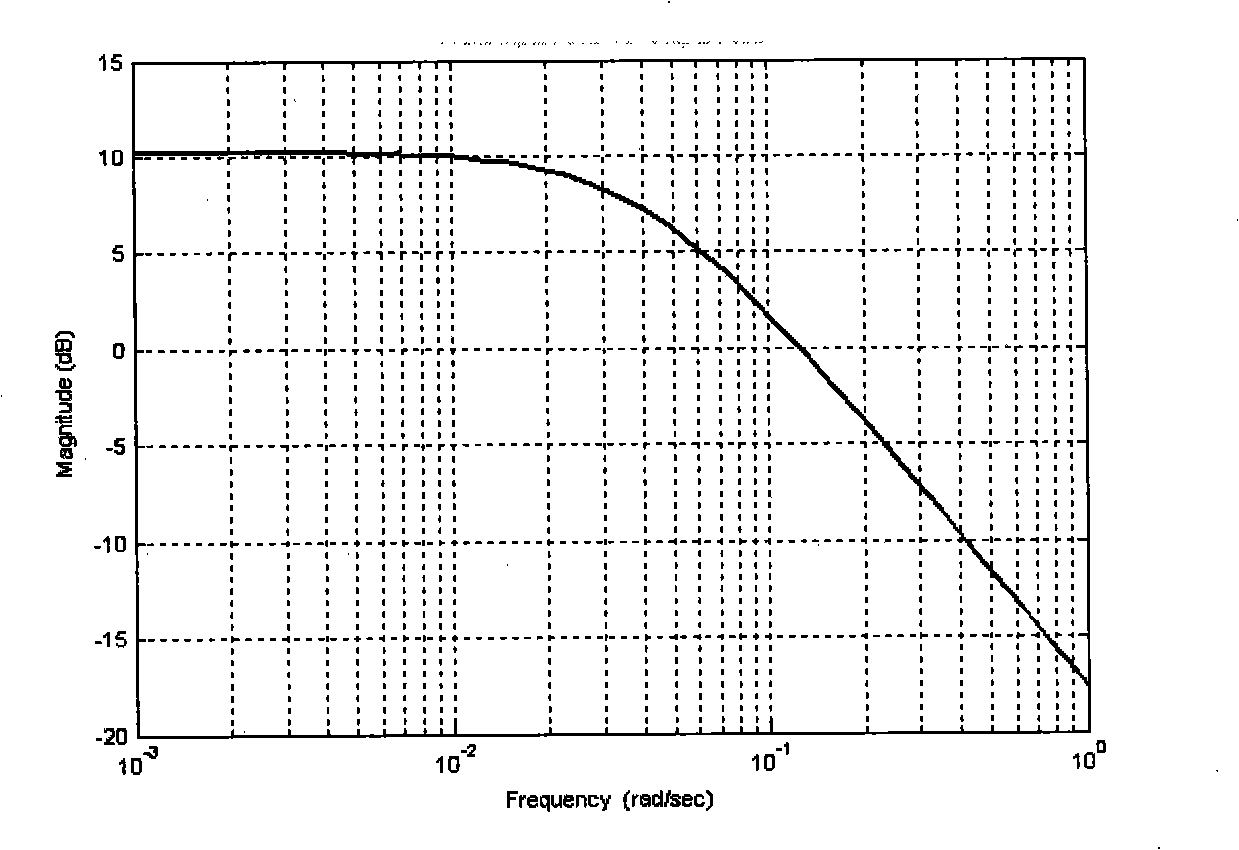
[0050] combine figure 1 , considering that the differential link will cause high-frequency disturbances during use, and the integral link will have accumulated errors during long-term use, resulting in zero drift, which will seriously affect the implementation of PID. In order to eliminate these problems, in the present invention, to the differential link, an approximate link is used to replace the differential link, so that the differential link is only effective in the system operating frequency band, and a low-pass filter is introduced to smoothen the differential output signal; The inertia link is replaced, and an ultra-low frequency filter is introduced at the same time to extract the DC component that causes the zero drift, and then the original integral output signal is used to subtract the zero drift DC component, so as to ensure the stability of the integ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More