

Multiple-joint service robot arm capable of implementing translational decoupling at Z direction
A service robot and multi-joint technology, applied in the field of robot arms and mechanical arms, can solve problems such as the inability to realize translational movement of the manipulator, and achieve the effect of simple and clear transmission relationship, low cost, and large range of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
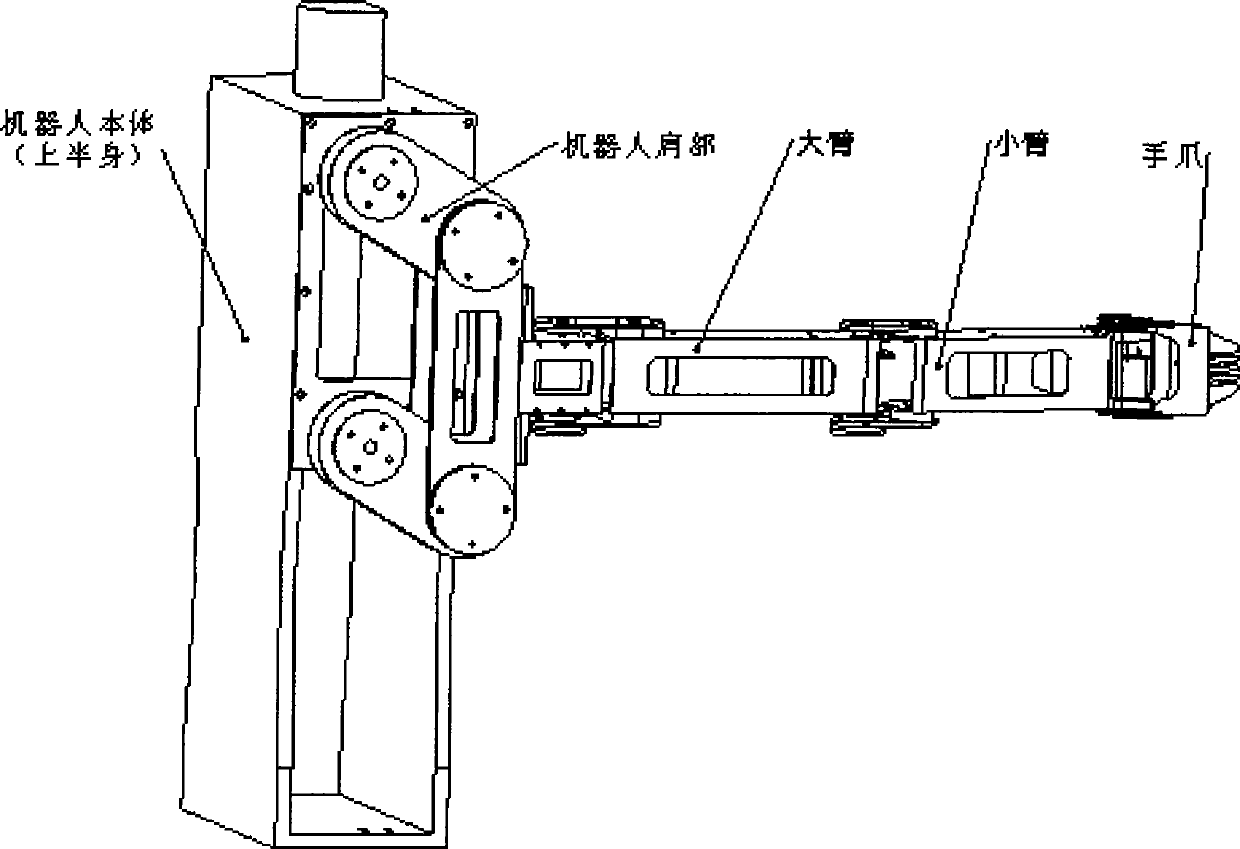
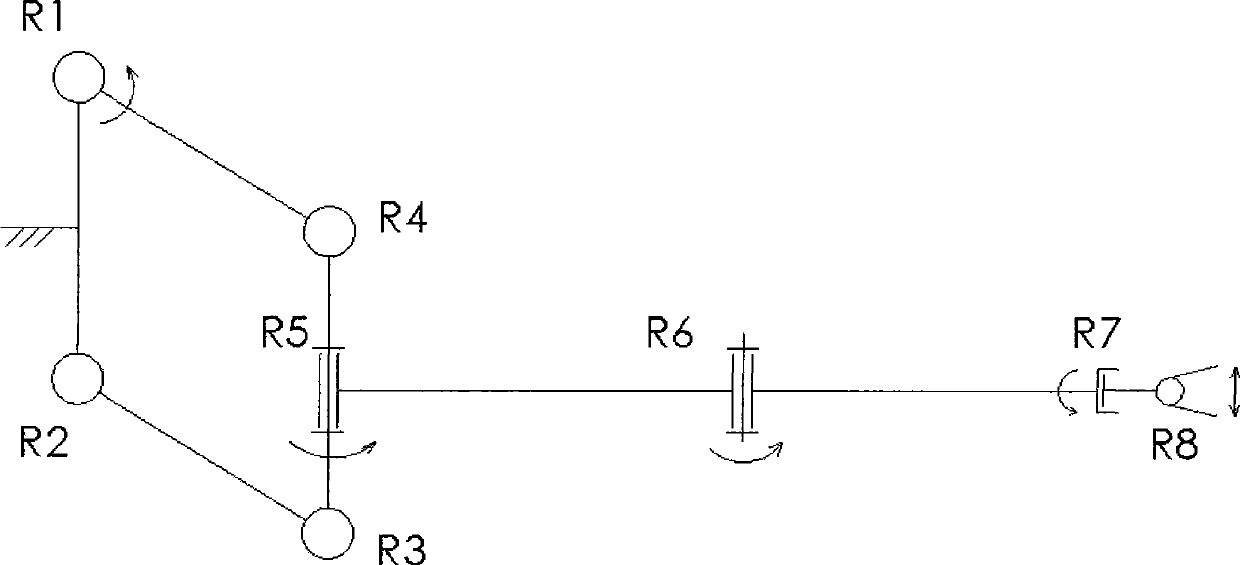
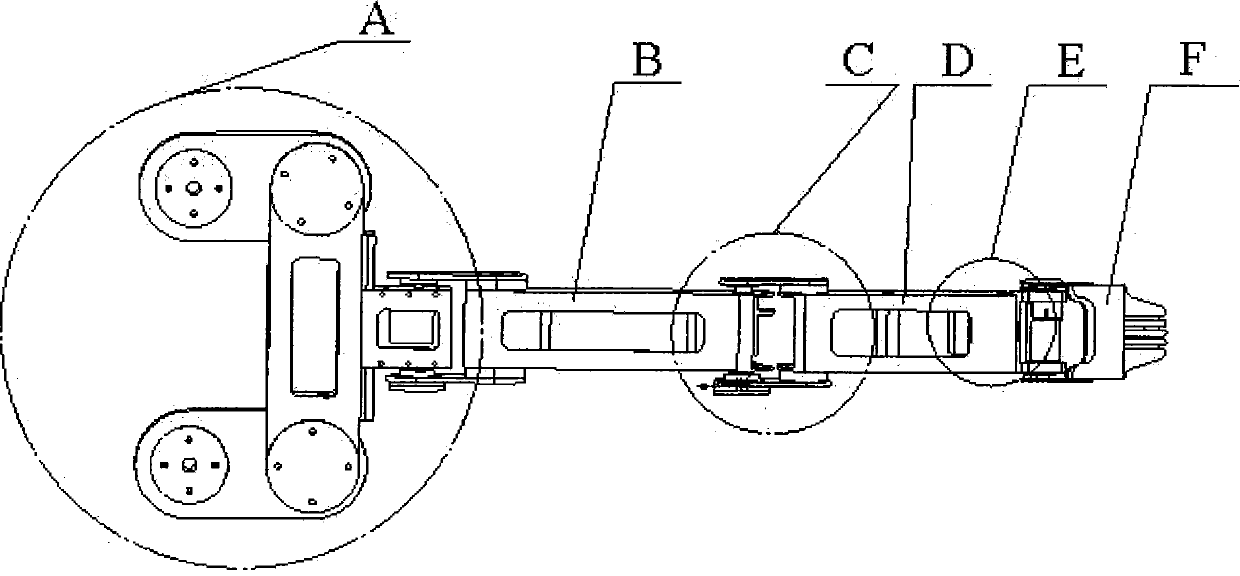
[0019] A multi-joint service robot arm that can realize translational decoupling in the Z direction (vertical direction). The arm structure adopts the U^6RR+R configuration.
[0020] The U^RR+R configuration is connected by a shoulder joint (A) with two swing joints, an elbow joint (C) with one swing joint, a wrist joint (E) with a swivel joint and a swing joint, and Composed of the upper arm (B) between the shoulder joint and the elbow joint, the forearm (D) connected between the elbow joint and the wrist joint, and the claw (F) connected with the wrist joint, the shoulder The upper joint includes a parallelogram mechanism and a shoulder connecting body, the motor connecting bushing (A1) is connected to the driving arm (A3) of the parallelogram mechanism, the motor connecting bushing (A1) is connected with the output shaft of the motor, and the shoulder connecting body is set On the connecting arm (A6) of the parallelogram mechanism, the shoulder connecting body includes a br...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More