

Steering brake stabilization control system of automobile
A technology of stability control and brake controller, which is applied in the direction of brakes, etc., can solve problems such as vehicle danger, entering the opposite driving lane and colliding with the vehicle coming from the opposite direction, and the car deviates from the expected driving lane, so as to reduce traffic accidents, Improved braking safety and reduced braking distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
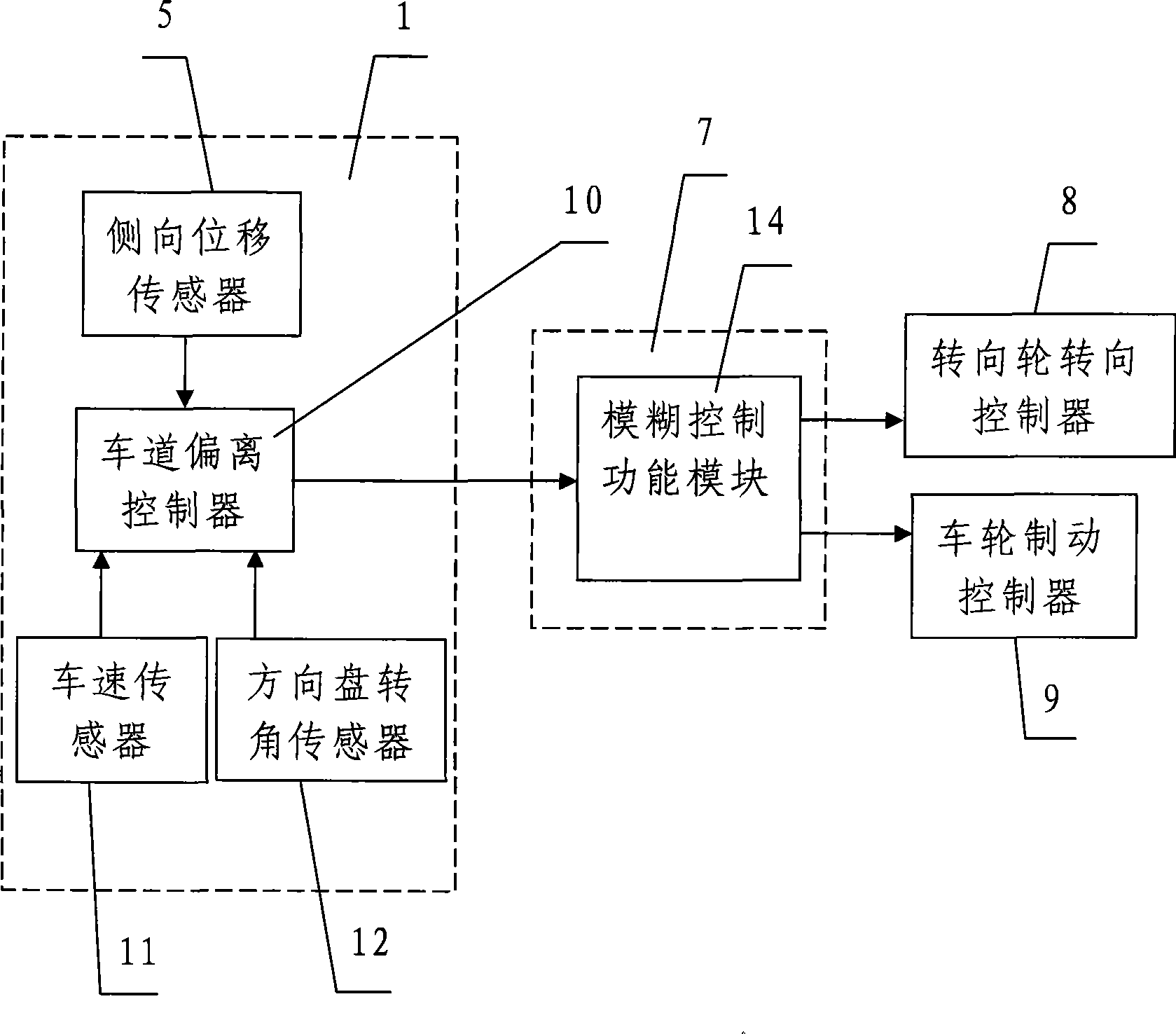
[0025] like figure 1 As shown, the present invention includes a lane departure measuring device 1 that detects the amount of lateral path deviation and an electronic device that controls the steering wheel steering controller 8 and each wheel brake controller 9 according to the output signal of the lane departure measuring device 1. control unit7.
[0026] Wherein, the lane departure measuring device 1 includes a lateral displacement sensor 5, and compares the actual lateral deflection displacement value detected by the lateral displacement sensor 5 in real time with the given lateral deflection displacement value given by the driver in real time. And draw the lane departure controller 10 of lateral path deviation amount; Said lane departure controller 10 joins with the vehicle speed sensor 11 that is installed on the car body and the steering wheel angle sensor 12 that real-time detection is carried out to the steering wheel angle angle, and the lane The deviation controller...
Embodiment 2
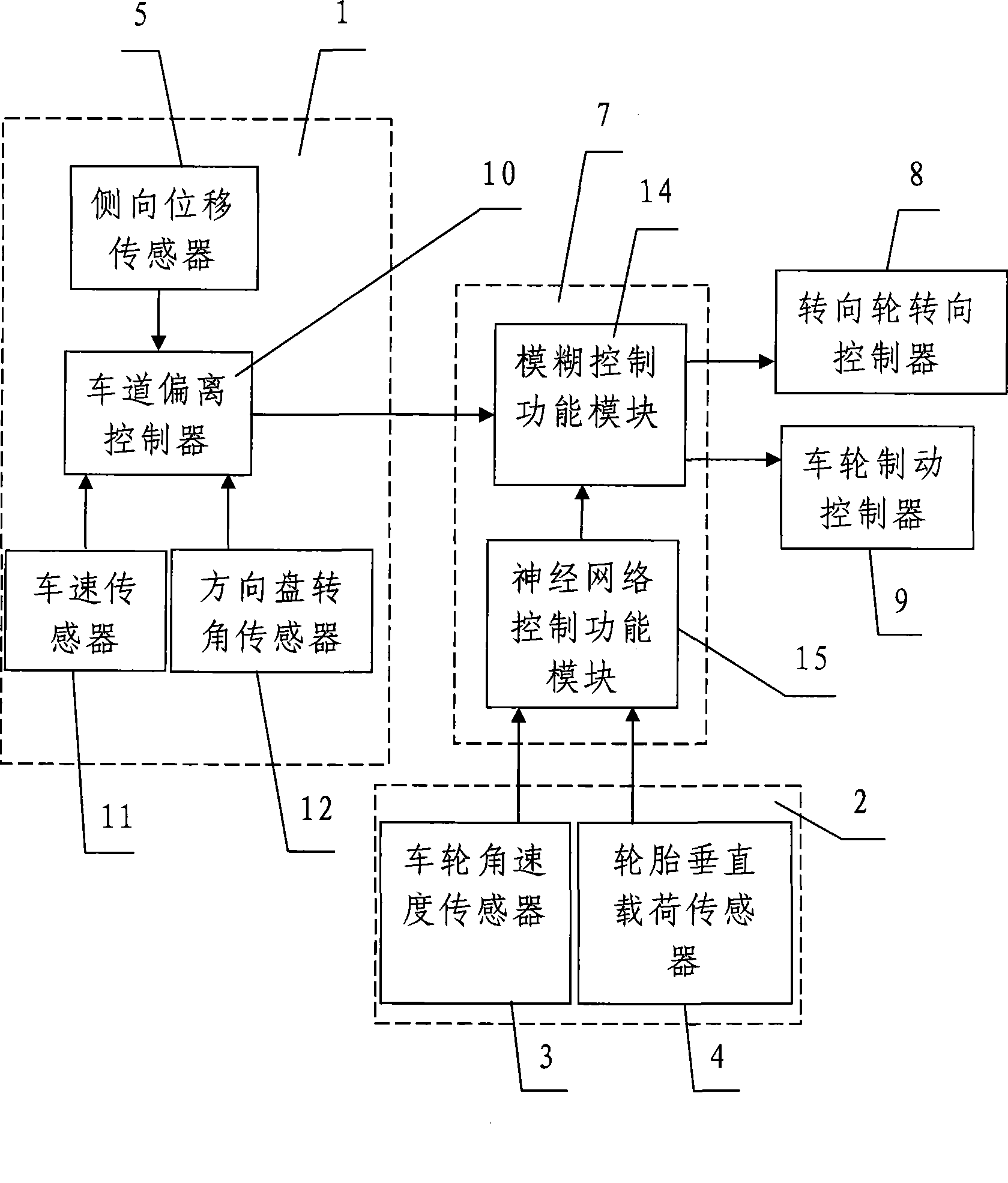
[0030] like figure 2 As shown, in this embodiment, the present invention also includes a tire parameter measuring device 2, which is a wheel angular velocity sensor 3 and a tire vertical load sensor 4 for real-time detection of four wheel angular velocities and vertical loads respectively. In addition, the electronic control unit 7 is also embedded with a tire lateral force neural network model and a tire longitudinal force neural network model correspondingly established according to the real-time detected signal of the tire parameter measurement device 2, and the two are synthesized into a multi-dimensional space characteristic of the tire force model. The neural network control function module 15 of the curved surface; the fuzzy control function module 14 is based on the signal detected by the lane departure measurement device 1 in real time and in combination with the tire optimal slip rate determined in real time by the multidimensional space characteristic surface of the...
Embodiment 3
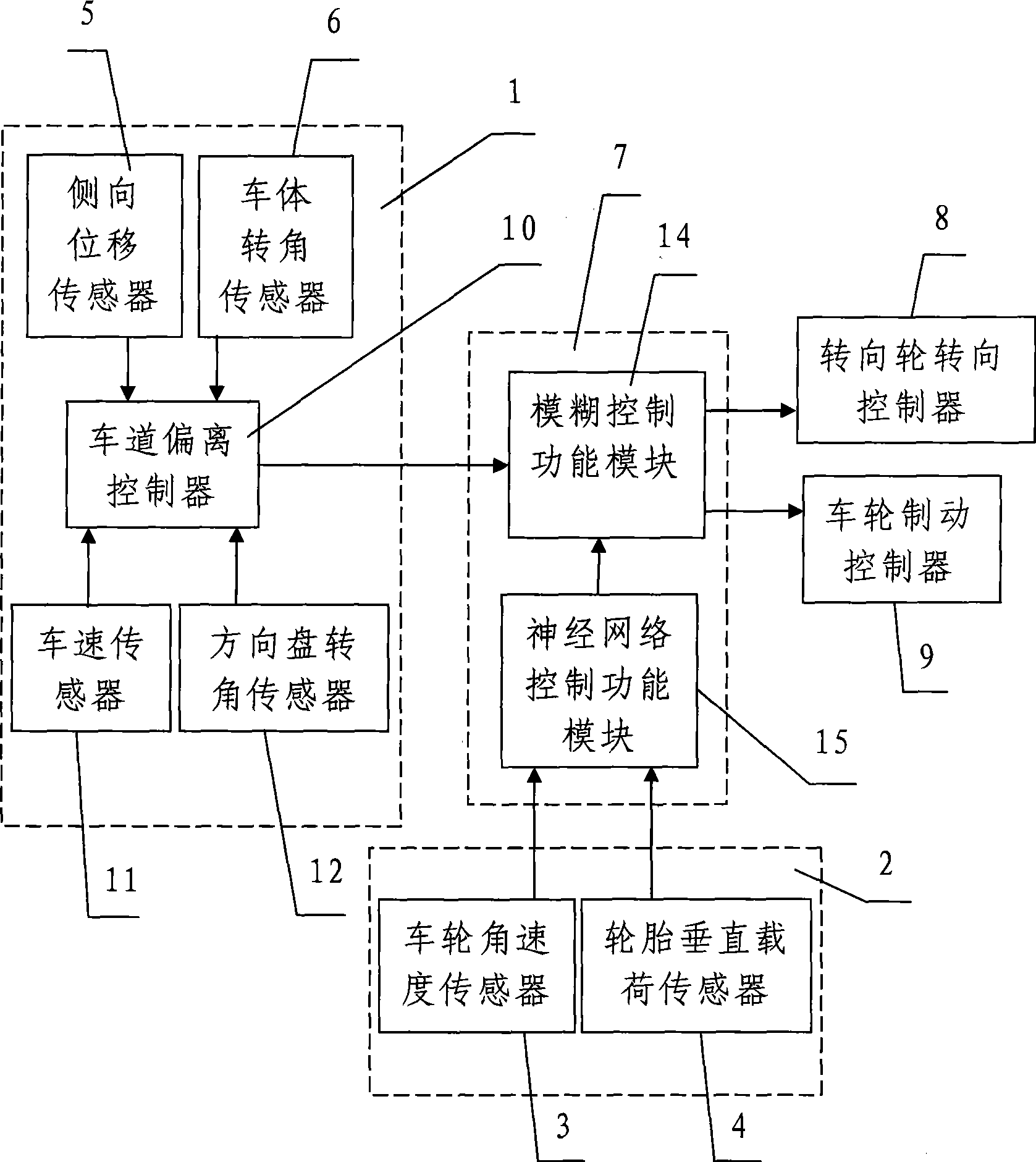
[0034] like image 3 As shown, in this embodiment, the lane departure measuring device 1 also includes a vehicle body angle sensor 6 installed at the center of mass of the vehicle body, and the lane departure controller 10 uses the lateral displacement sensor 5 and the vehicle body angle sensor 6 to measure the vehicle body angle in real time. The detection signal is combined and compared with the given lateral deflection displacement value to obtain the lateral path deviation amount. Therefore, when the automobile performs steering braking, the vehicle body rotation angle sensor 6 installed at the center of mass of the vehicle body detects the actual deflection angle of the vehicle body in real time, and simultaneously transmits the detected signal to the lane departure controller 10 synchronously. The deviation controller 10 combines the signals detected by the lateral displacement sensor 5 and the vehicle body angle sensor 6 in real time to determine the actual deflection d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More