Rapid replacing interface for assisted minimally invasive surgical operation robot
A technique of surgical robot and minimally invasive surgery, which is applied in the fields of surgery, medical science, etc. It can solve the problems of increased transmission system friction, easy damage of buttons, and short service life, and achieves high quick-change efficiency, reliable transmission, and simple structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Firstly, the existing structure will be described below in conjunction with the accompanying drawings.
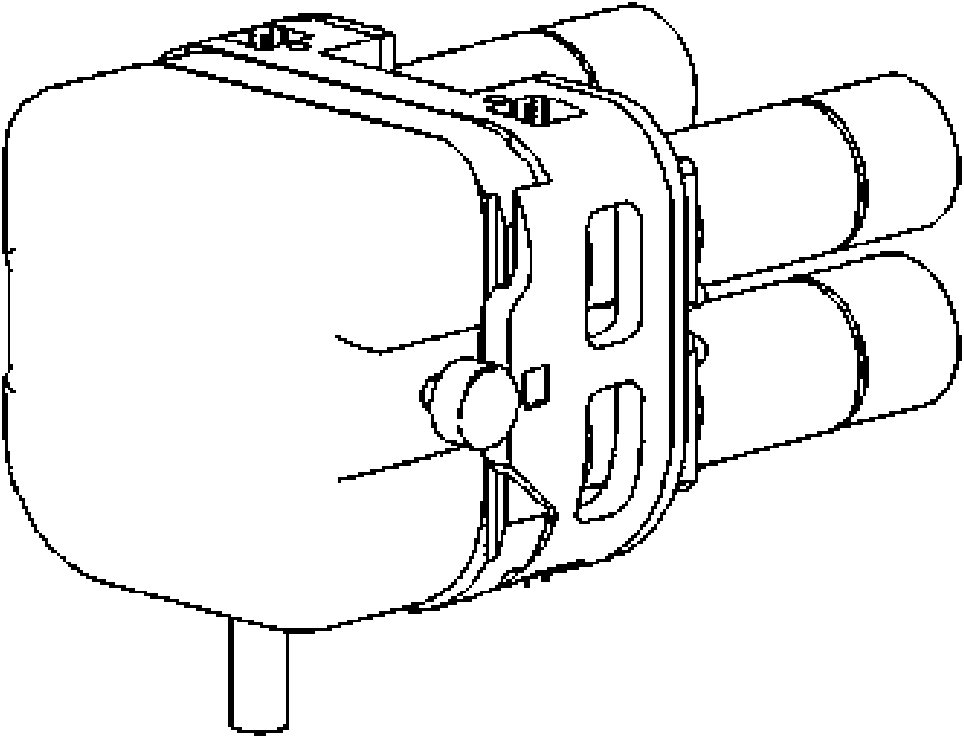
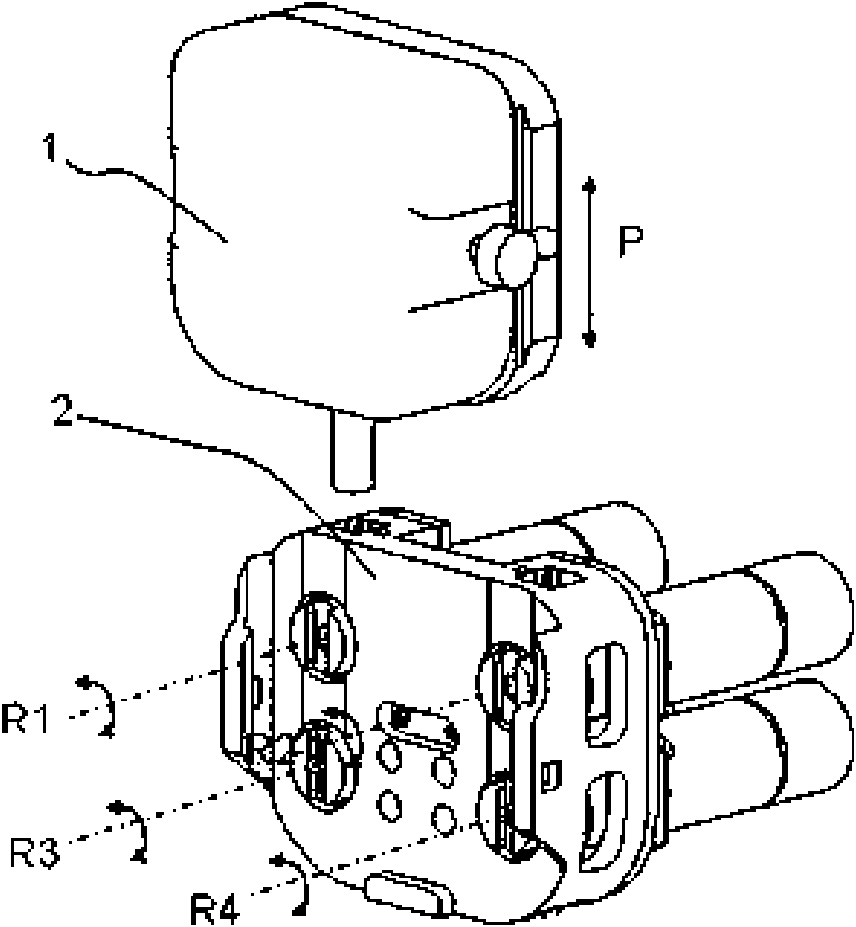
[0021] figure 1 , figure 2 Shown is the overall structure schematic diagram of the present invention, figure 1 It is a schematic diagram of the overall quick change interface, figure 2 Shown in is an exploded schematic view of the structure of the present invention. 1 in the figure is the quick change box part, 2 is the quick change seat part. The quick change box part 1 can slide along the guide groove in the quick change seat part 2 along the P direction. R1-R4 is the rotation direction of the servo motor in the quick change interface.
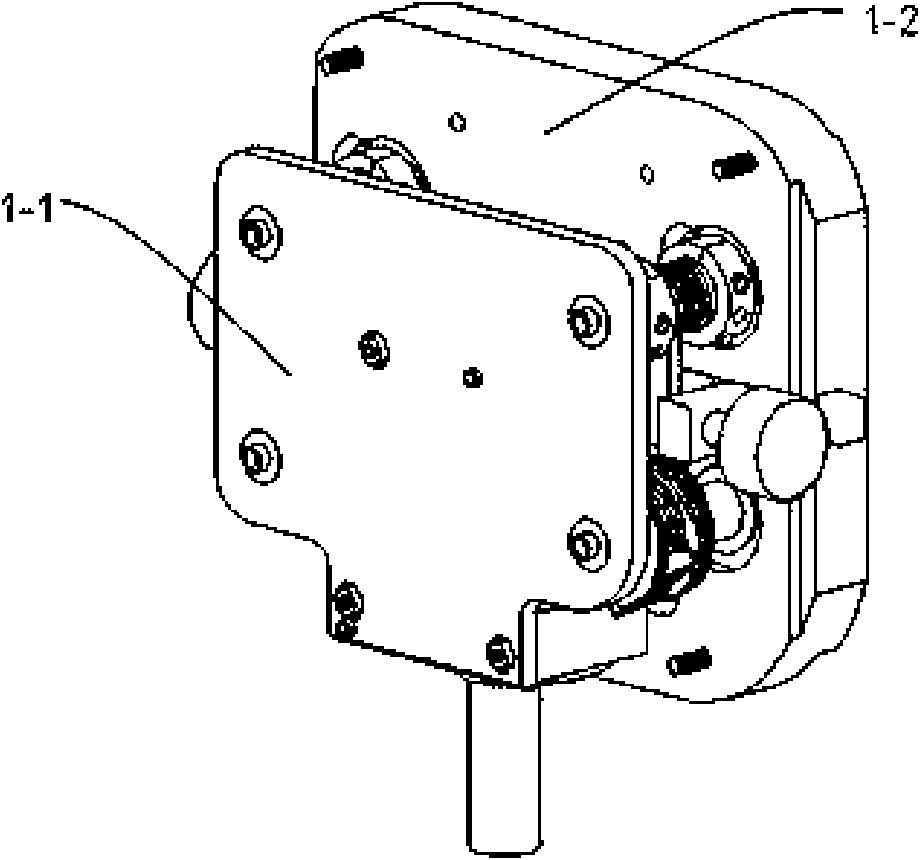
[0022] The structural diagram of the quick change box part is as follows: Figure 3 to Figure 7 shown. The rotating shaft partly installed in the quick-change box of the present invention is conventionally arranged, that is, includes a left fingertip rotating shaft part 1-3, a right fingertip rotating shaft part 1-5, a pit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com