

K nearest fuzzy clustering WLAN indoor locating method based on REE-P
A fuzzy clustering and indoor positioning technology, applied in positioning, measuring devices, instruments, etc., can solve the problems of reference point positioning error, poor adaptability, global signal adjustment or correction, etc., and achieve the effect of improving positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
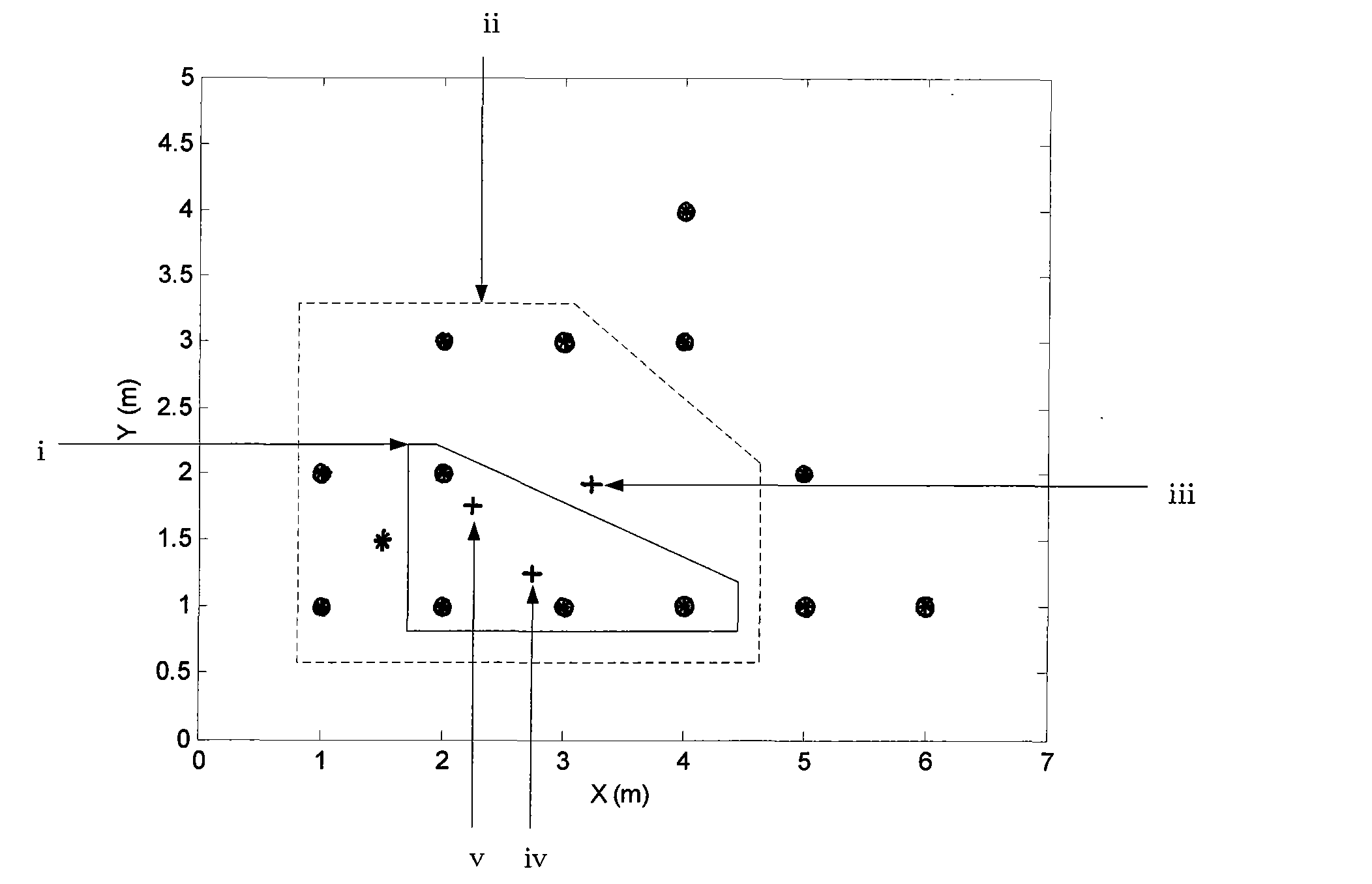
[0009] Specific Embodiment 1: This embodiment is realized through the following steps: 1. Measure and record the RSS signal received by the user terminal at the desired positioning point; 2. Use the K nearest neighbor method to determine the K most similar to the signal characteristics of the desired positioning point Reference point; 3. Use the fuzzy clustering algorithm to classify the RSS value of the selected reference point, calculate the square of the difference between the component in each cluster center vector and the RSS value from the corresponding AP, and accumulate these values in the class , select the class with the smallest sum; 4. For the reference points determined by the K-nearest neighbor method in step 2, use the fuzzy clustering algorithm again to classify the positions of all reference points, and select the same class as that selected according to the RSS classification A class of reference points with the most reference points; 5. Take the union of ...
specific Embodiment approach 2
[0011] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the fuzzy clustering algorithm adopts the fuzzy c mean (Fuzzy c mean) clustering algorithm, that is, the FCM algorithm. The algorithm is as follows:
[0012] The clustering criterion is to find the best combination pair (U, P), so that when the constraint μ is satisfied ik ∈ M hc , make the objective function J m (U,P) min. The general description of the objective function is:
[0013] J m ( U , P ) = Σ k = 1 n Σ ...
specific Embodiment approach 3
[0024] Specific implementation mode three: this implementation mode is realized through the following steps:
[0025] Offline phase:
[0026] Step 1: WLAN indoor positioning network planning and layout. The location of the access point (AP) must first meet the requirements of WLAN communication and ensure uniform and seamless coverage of WLAN signals. On this basis, try to make each desired positioning point receive signals from more than three access points.
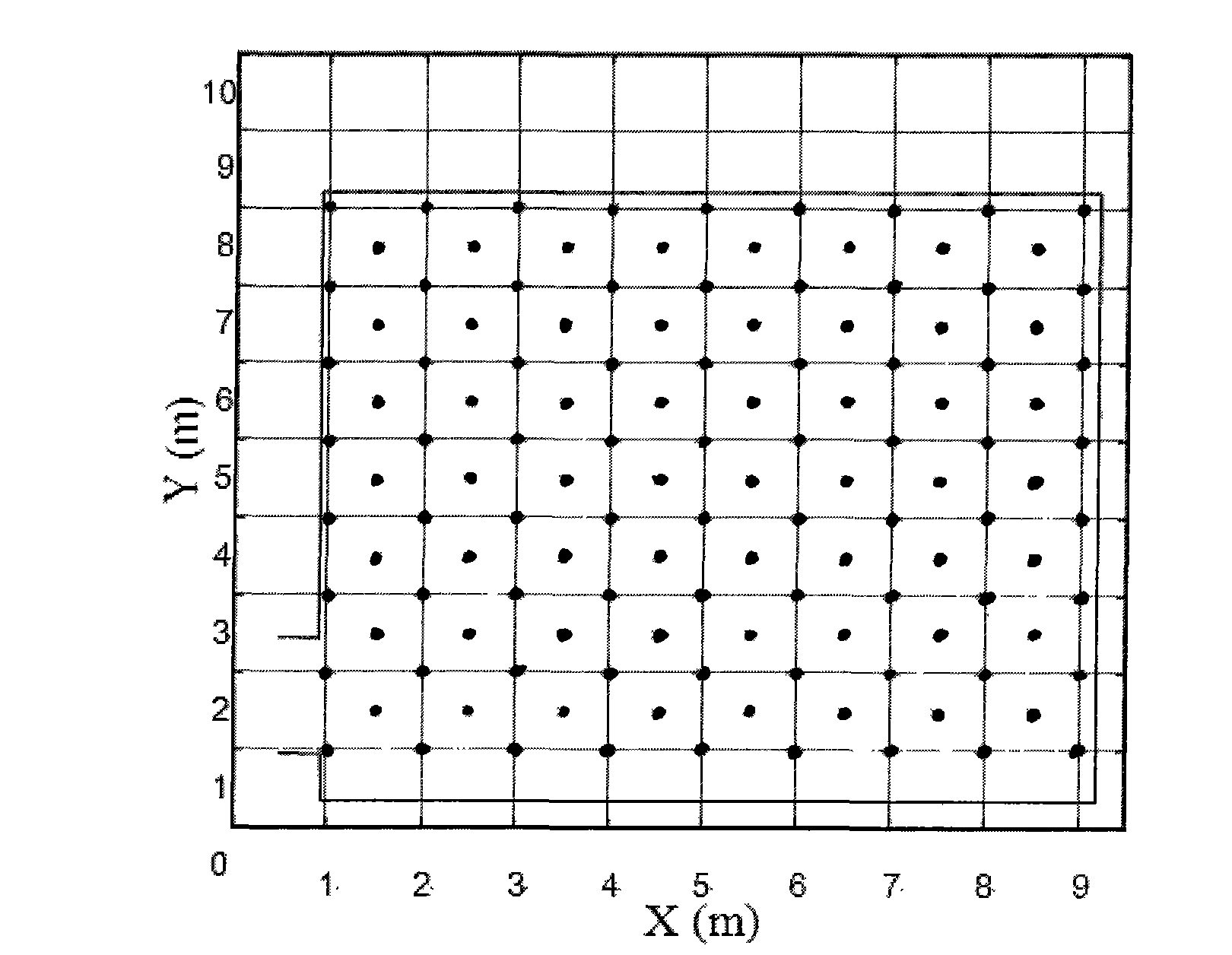
[0027] Step 2. Select reference points and test points. Evenly select the reference points, arrange the reference points in a uniform grid-like distribution, and record the position coordinates corresponding to the reference points.
[0028] Step 3: Measure and record the RSS signal of the access point that can be received at each reference point, and construct a location fingerprint map.
[0029] Online phase:
[0030] Step 1. Measure and record the RSS signal received by the user terminal.
[0031] Step 2: Apply...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More