

Method for controlling rising velocity of movable arm of excavator, control system and excavator
A technology for controlling excavation and control system, which is applied to mechanically driven excavators/dredgers, etc., can solve the problems of back-and-forth vibration of the whole excavator in the horizontal direction, achieve convenient control methods, improve construction efficiency, and increase service life Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments to further understand the purpose, solution and effect of the present invention, but it is not intended to limit the scope of protection of the appended claims of the present invention.
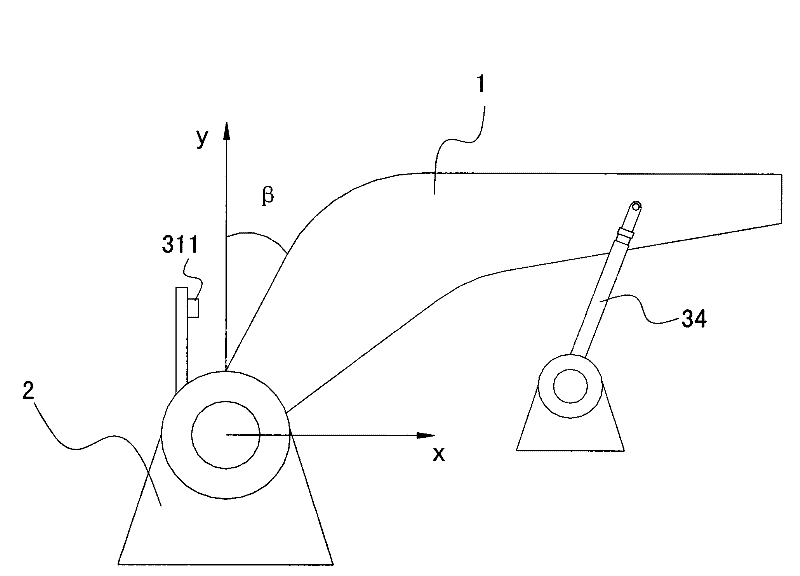
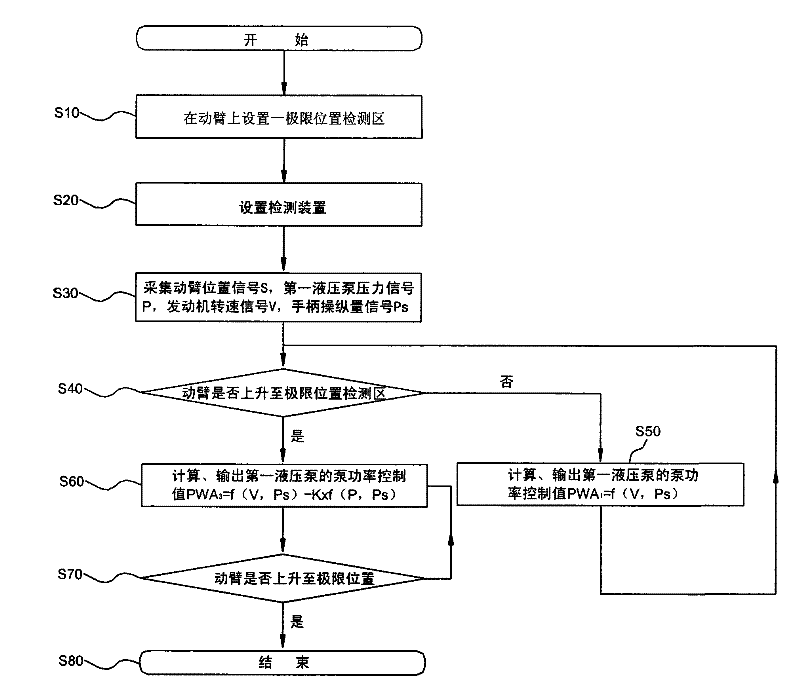
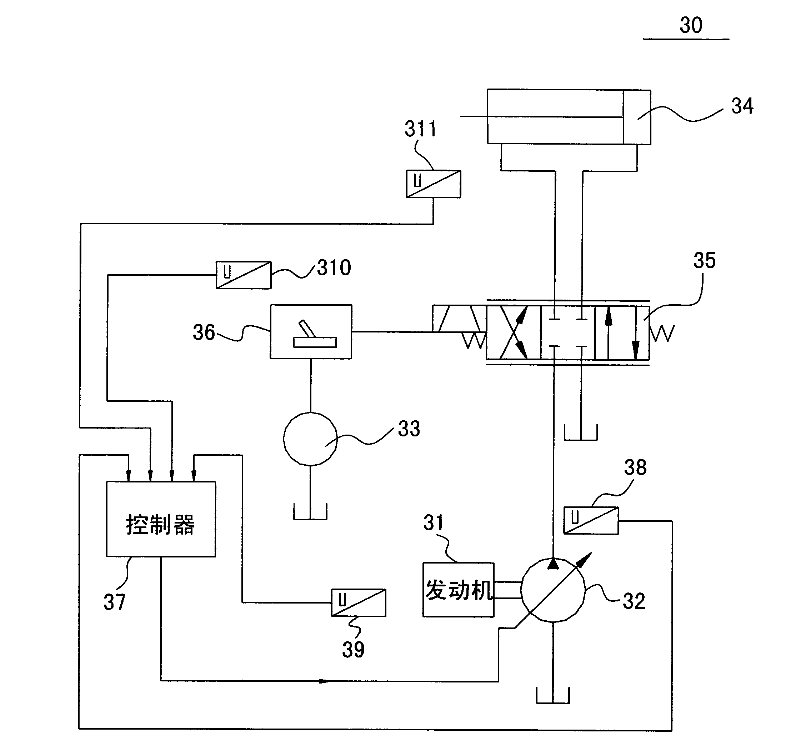
[0050] Such as figure 1 Schematic diagram of boom installation of the present invention and figure 2 The flow chart of the method for controlling the lifting speed of the excavator arm of the present invention is shown in conjunction with reference image 3 The structural block diagram of the control system of the present invention, the excavator of the present invention is the same as the excavator mechanism of the prior art, and its boom 1 is hinged on the boom seat 2, and the boom 1 moves under the action of the boom cylinder 34, wherein the boom 1 The action of the arm oil cylinder 34 is controlled by the engine 31, the first hy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More