


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Image processing apparatus for detecting coordinate position of characteristic portion of face
An image processing device and coordinate position technology, which is applied in image data processing, image enhancement, image analysis, etc., to achieve the effect of correction of good set position and high efficiency of detection processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
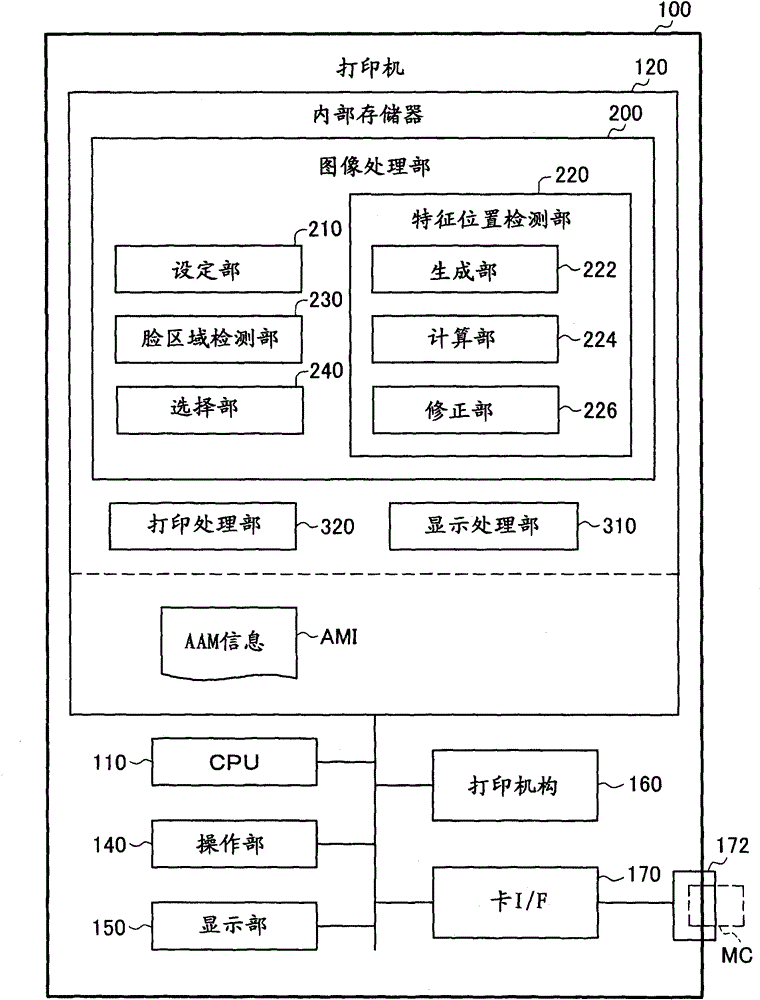
[0041] A1. The structure of the image processing device:
[0042] figure 1It is an explanatory diagram schematically showing the configuration of the printer 100 as the image processing apparatus in the first embodiment of the present invention. The printer 100 of this embodiment is an inkjet color printer corresponding to a so-called direct thermal printer that prints images based on image data acquired from a memory card MC or the like. The printer 100 includes a CPU 110 for controlling each part of the printer 100, an internal memory 120 composed of ROM and RAM, an operation unit 140 composed of buttons or a touch panel, a display unit 150 composed of a liquid crystal display, a printing mechanism 160, and a card interface. (Card I / F) 170. The printer 100 may also be provided with an interface for data communication with other devices such as a digital camera or a personal computer. The constituent elements of the printer 100 are connected by a bus so as to be capable of...
no. 2 Embodiment
[0114] Figure 18 It is a flowchart showing the flow of the initial arrangement determination process of the characteristic points CP in the second embodiment. Regarding the characteristic point CP initial position setting process, in the first embodiment, the setting unit 210 determines the initial position based on the temporary setting position of the characteristic point CP set by changing the value of the global parameter, but in the second embodiment In the embodiment, the shape parameter selected by the selection unit 240 is further used to determine the initial position. because Figure 18 Step S510 to step S540 of the same as in the first embodiment Figure 12 Step S310 to step S340 are the same, so the description is omitted. However, in the second embodiment, the minimum norm temporary setting position determined in step S340 is referred to as a "reference temporary initial position".
[0115] Selection section 240 ( figure 1 ) select feature quantities based o...
Deformed example 1
[0123]In the first embodiment, the selection of the feature value by the selection unit 240 is performed after the convergence determination of the difference image Ie by the feature position detection unit 220 (step S430), but the selection time of the feature value by the selection unit 240 is not particularly Limitation can also be performed before convergence judgment. Also in the second embodiment, the selection unit 240 may select the feature amount at any time after the setting unit 210 sets the reference temporary initial position (step S540 ) in the same manner.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com