

Intelligent moving mechanical arm control system
A technology for moving manipulators and controllers, applied to manipulators, manufacturing tools, etc., can solve problems such as poor system flexibility and limited intelligence level, and achieve the effects of improving redundancy, reducing processing overhead, and reducing overhead
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with accompanying drawing.
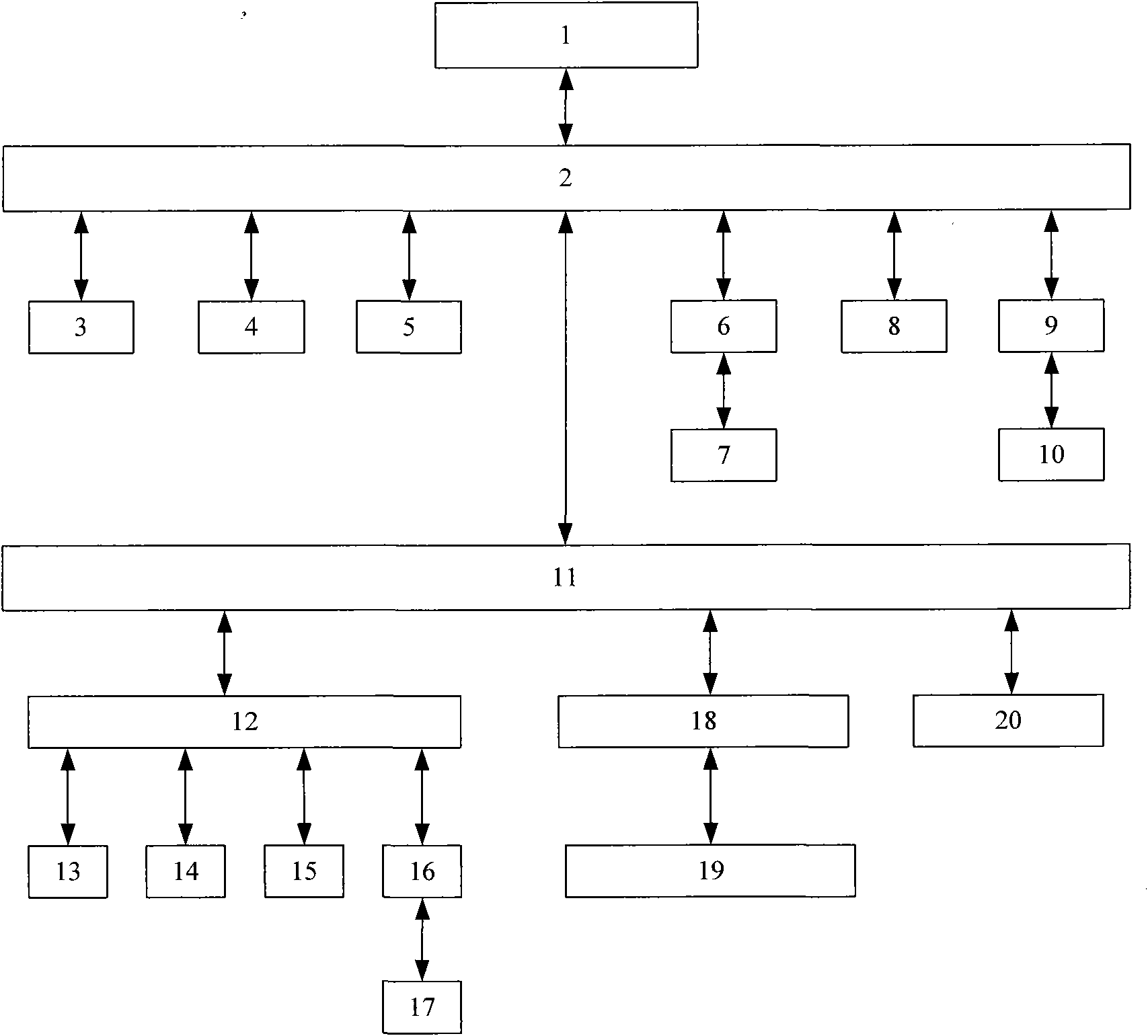
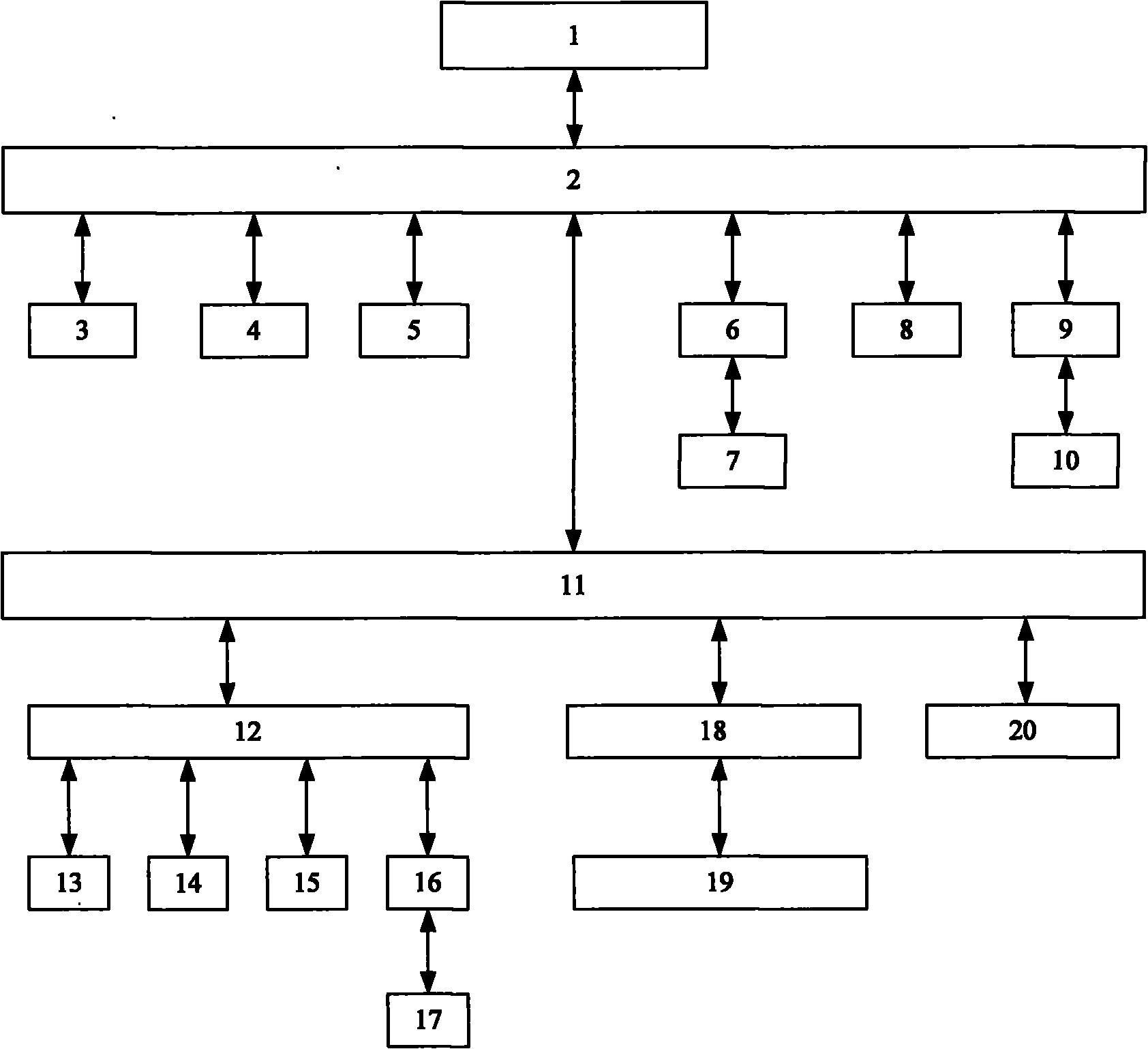
[0015] Such as figure 1 As shown, the portable computer 1 is connected to the embedded industrial control computer 2, and the embedded industrial control computer 2 is connected to the autonomous navigation car controller 12 through the CAN-bus bus;
[0016] The autonomous navigation car controller 12 directly controls the left and right wheel motor servo drivers 16 through PWM or analog, and drives the left and right wheel motors 17 of the mobile robot platform to move. The autonomous navigation car controller 12 can plan and process the ultrasonic sensor 14 and the collision switch 15 at the bottom layer to improve the reaction speed. The gyroscope 13 communicates with the autonomous navigation car controller 12 through the RS232 interface to correct the position of the robot. Each module controller of the arm joint module 20 of the mobile manipulator platform communica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More