

Image texture tactile representation system based on force/haptic interaction equipment
An interactive device and tactile reproduction technology, applied in the input/output of user/computer interaction, the input/output process of data processing, and graphic reading, etc., can solve the problems of lack of realism, limited texture types, and inability to simulate texture touch sense, etc. problem, to achieve the effect of improving realism and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0090] A force-tactile reproduction system of stone image texture based on DELTA hand controller,
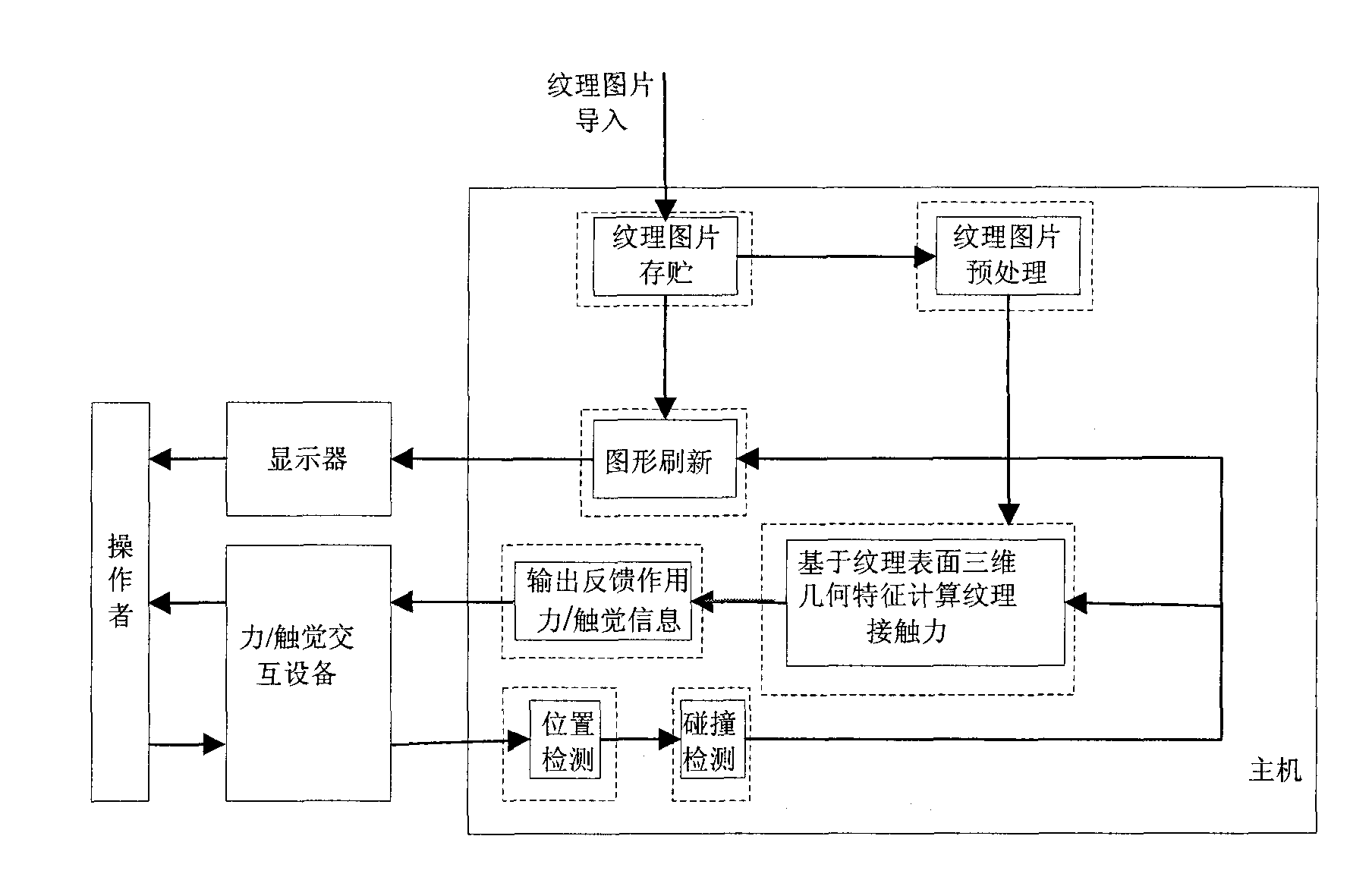
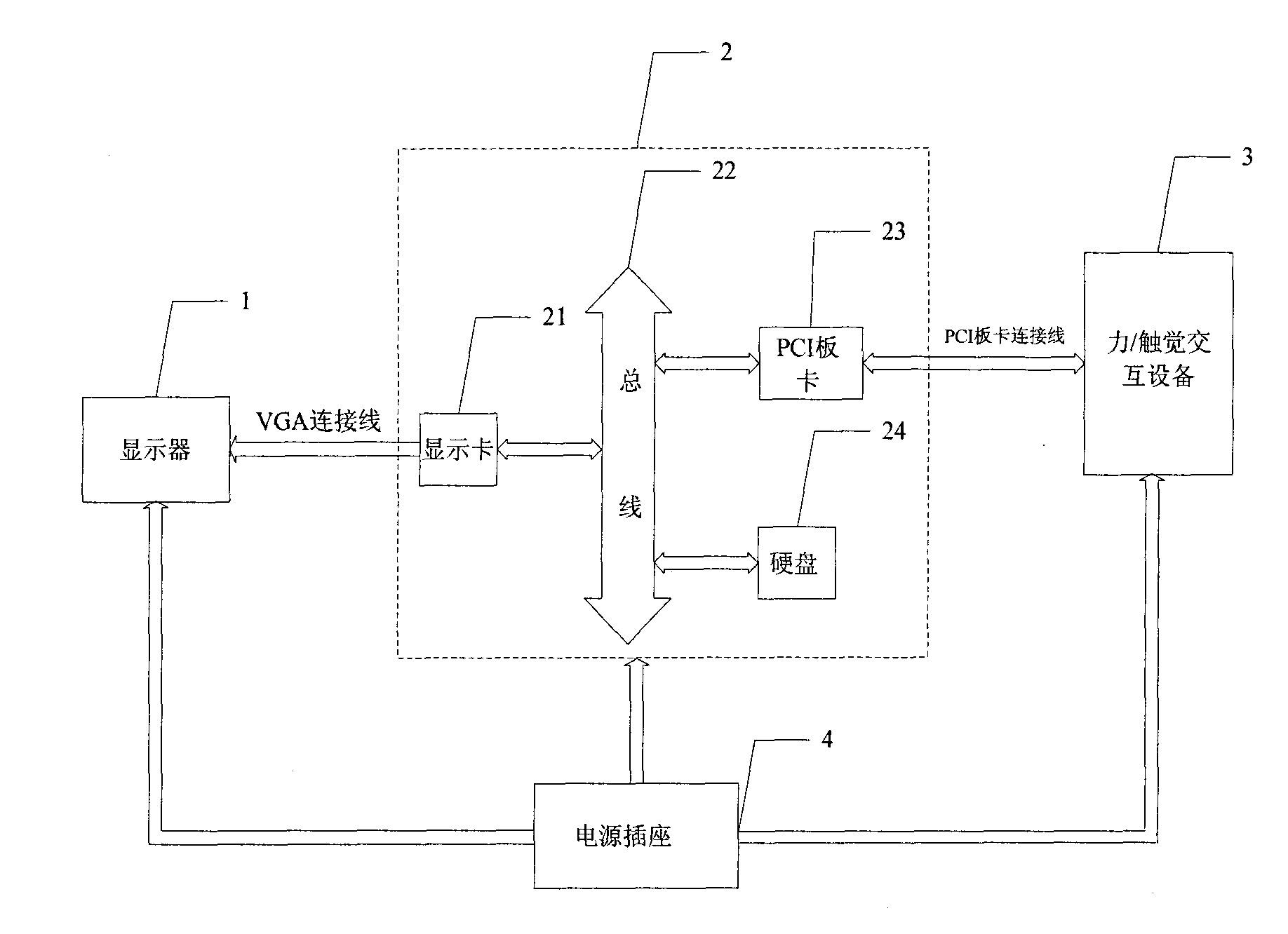
[0091]The operating platform of this example is Windows 2000, the development language is VC++6.0, and it is based on the OpenGL graphics library. The force / tactile interaction device is a 6-DOF DELTA hand controller, and its working space range is translation Φ360mm×L300mm and rotation ±20deg / axis, which can realize force tactile feedback along the X, Y, and Z axes, through the DELTA hand controller The handle at the end can touch, sense and control the virtual ball sliding on the virtual stone texture surface, and feedback the texture force tactile information generated during the interaction to the operator in real time,
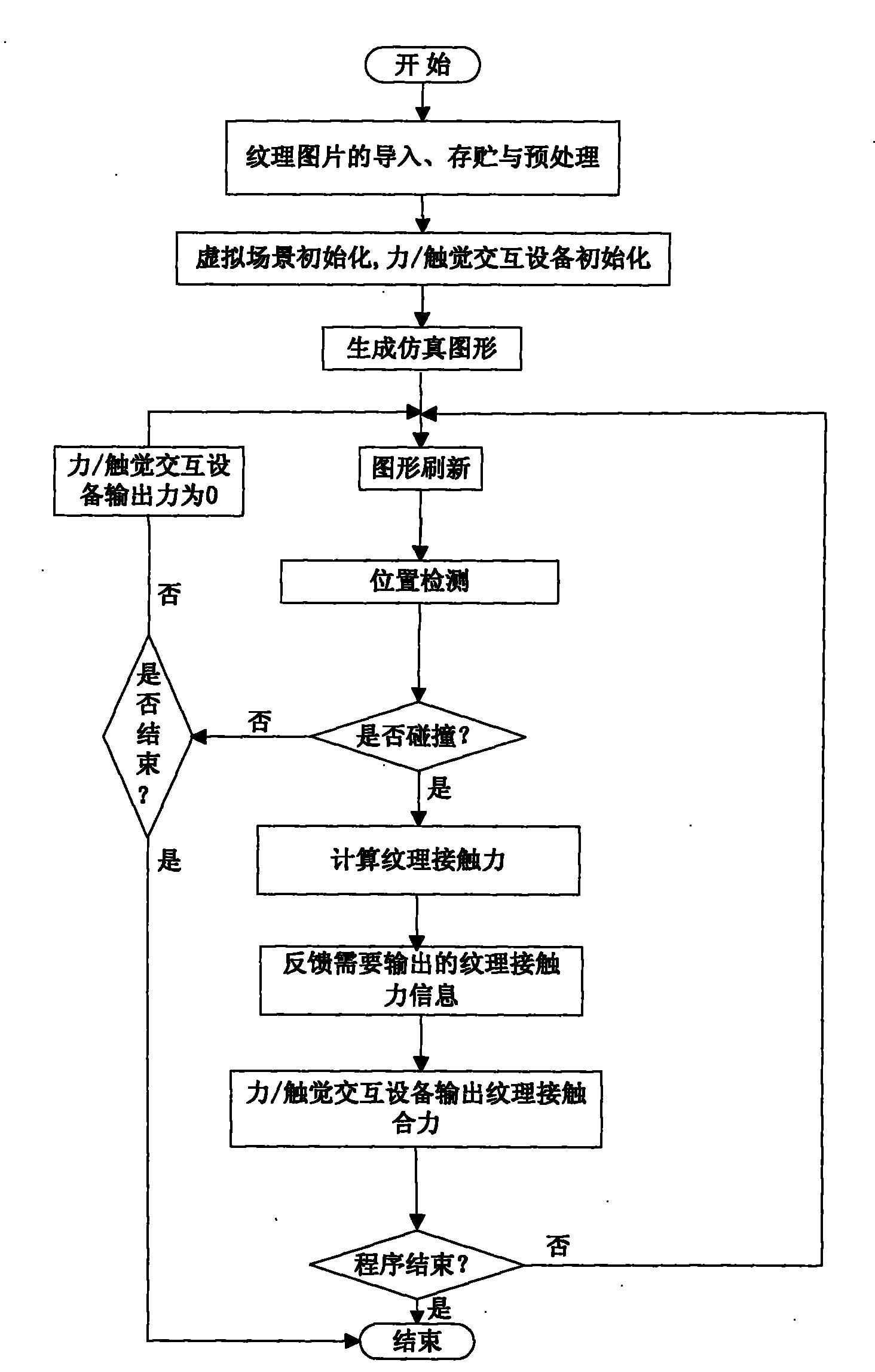
[0092] The haptic reproduction system includes:
[0093] Step 1. For externally imported stone texture pictures (such as Figure 12 As shown in a) after preservation,
[0094] Step 2: The system performs image processing on the called stone texture pictu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More