

Active two-dimensional tracking collimator
An active collimator technology, applied in the field of collimator and active two-dimensional tracking, can solve the problems that the prism cannot be rotated and leveled, does not have the function of rotation, does not have the ability to measure the collimation deviation angle, etc., and achieves azimuth adjustment Convenience, the effect of eliminating gaps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
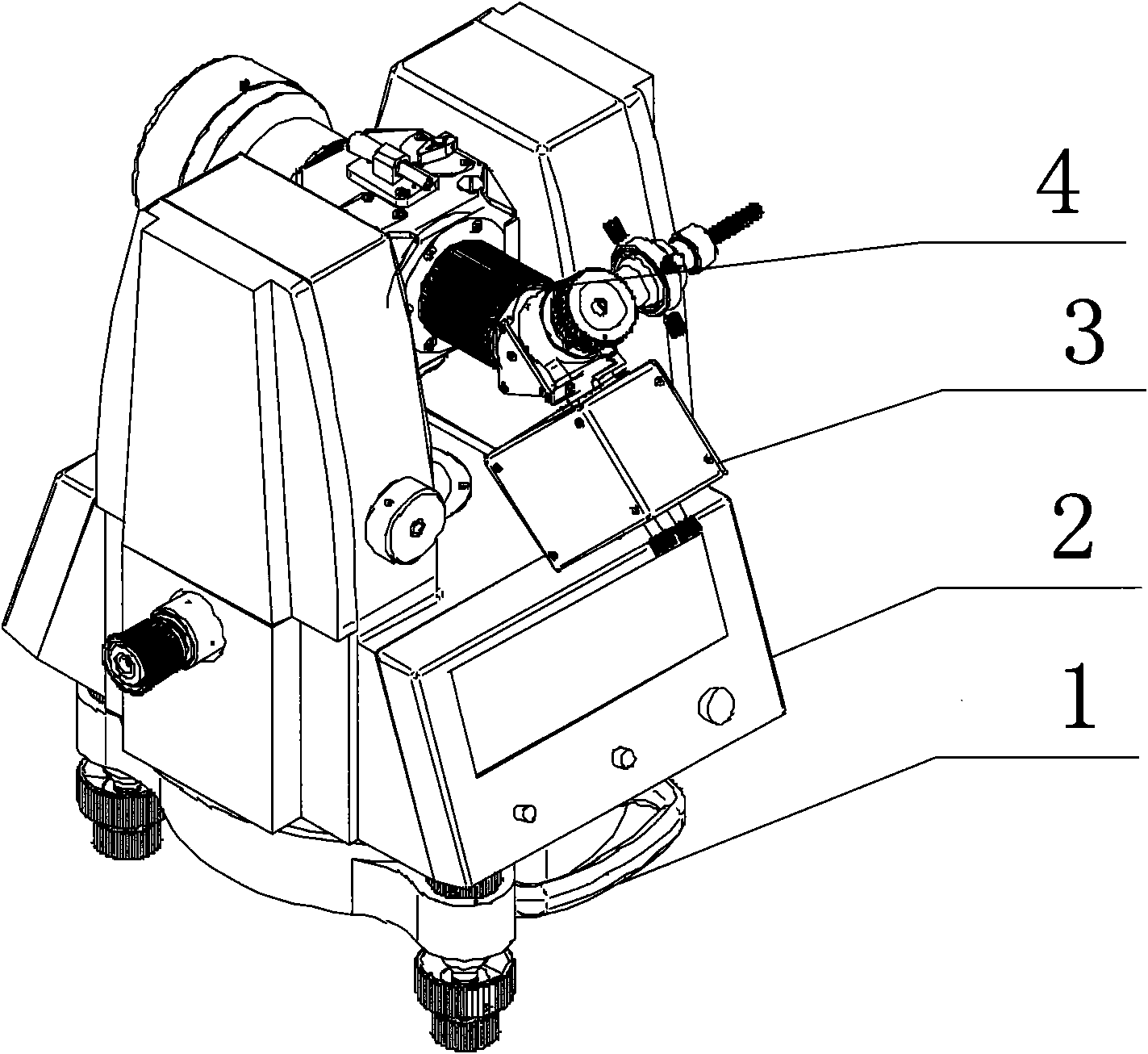
[0028] The invention mainly solves the initial azimuth measurement of a new generation carrier rocket based on the strapdown inertial group, and the strapdown inertial group tracking under the condition of rocket deformation or wind swing, and can realize the remote control aiming of the rocket with the cooperation of other single machines of the aiming system. The new generation of launch vehicles requires ground aiming to have collimation measurement capabilities. When the launch pad and the prism cannot be rotated, the collimator is used to capture and measure the angle between the normal of the prism and the known reference, and the measurement results are sent to the outside world through the network. At the same time, it is required that the ground aiming has the ability of unattended remote control aiming in the aiming room. The invention proposes a technical realization approach of an active two-dimensional tracking and collimating instrument, which is matched with a ne...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More