

Method for determining initial attitude of inertial navigation system based on Kalman filtering
An inertial navigation system and Kalman filtering technology, applied in directions such as navigation through velocity/acceleration measurement, can solve problems such as unreliable calculation, unusable, high-frequency wave interference, etc., to improve observability, calibration accuracy, The effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0028] Below in conjunction with accompanying drawing, the utility model is further described:
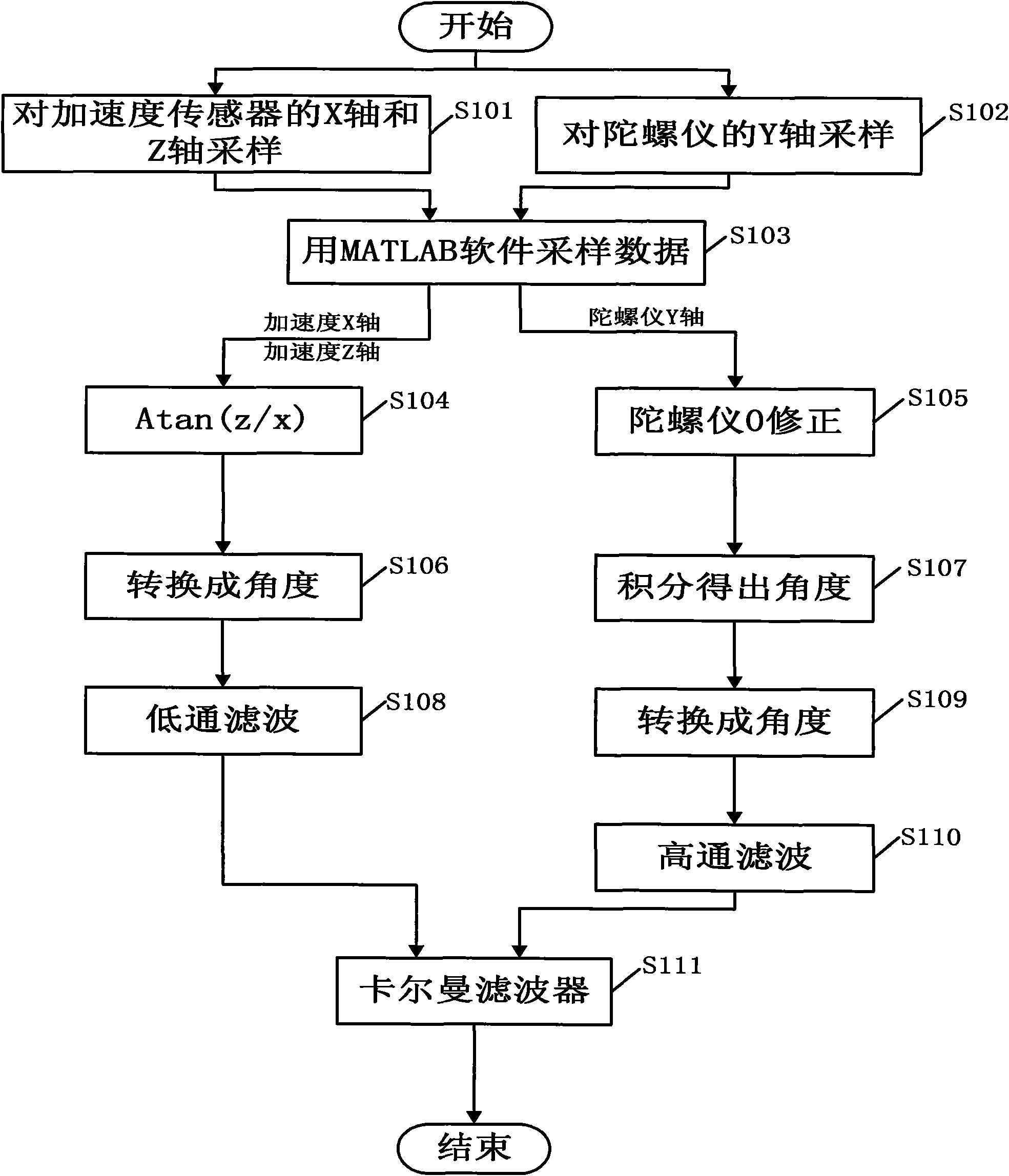
[0029] Such as figure 1 As shown, the initial attitude determination method of the inertial navigation system based on the Kalman filter is characterized in that it comprises the following steps:
[0030] In step 101 and step 102, the navigation system is preheated and kept at the initial position, which is called the first position, and the acceleration sensor is used to sample the X-axis and the Z-axis; the gyroscope is used to sample the Y-axis;
[0031] Then in step 103, the X-axis and Z-axis sampling of the above-mentioned acceleration sensor, and the Y-axis sampling of the gyroscope respectively estimate the data collected by the roll angle and transmit them to the MATLAB of the PC computer for data analysis and processing through RS232;
[0032] In step 105, step 107 and step 109, the above-mentioned processed data is corrected by the gyroscope and integrated to obtain the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More