

Modeling method of symmetrical type plate spring virtual model enhancing haptic feedback
A modeling method and virtual model technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as low precision, low calculation precision, difficulty in model construction, and difficulty in parameter selection and simulation effect accuracy. Achieve the effect of improving fidelity, simple calculation, accurate and fast calculation of deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
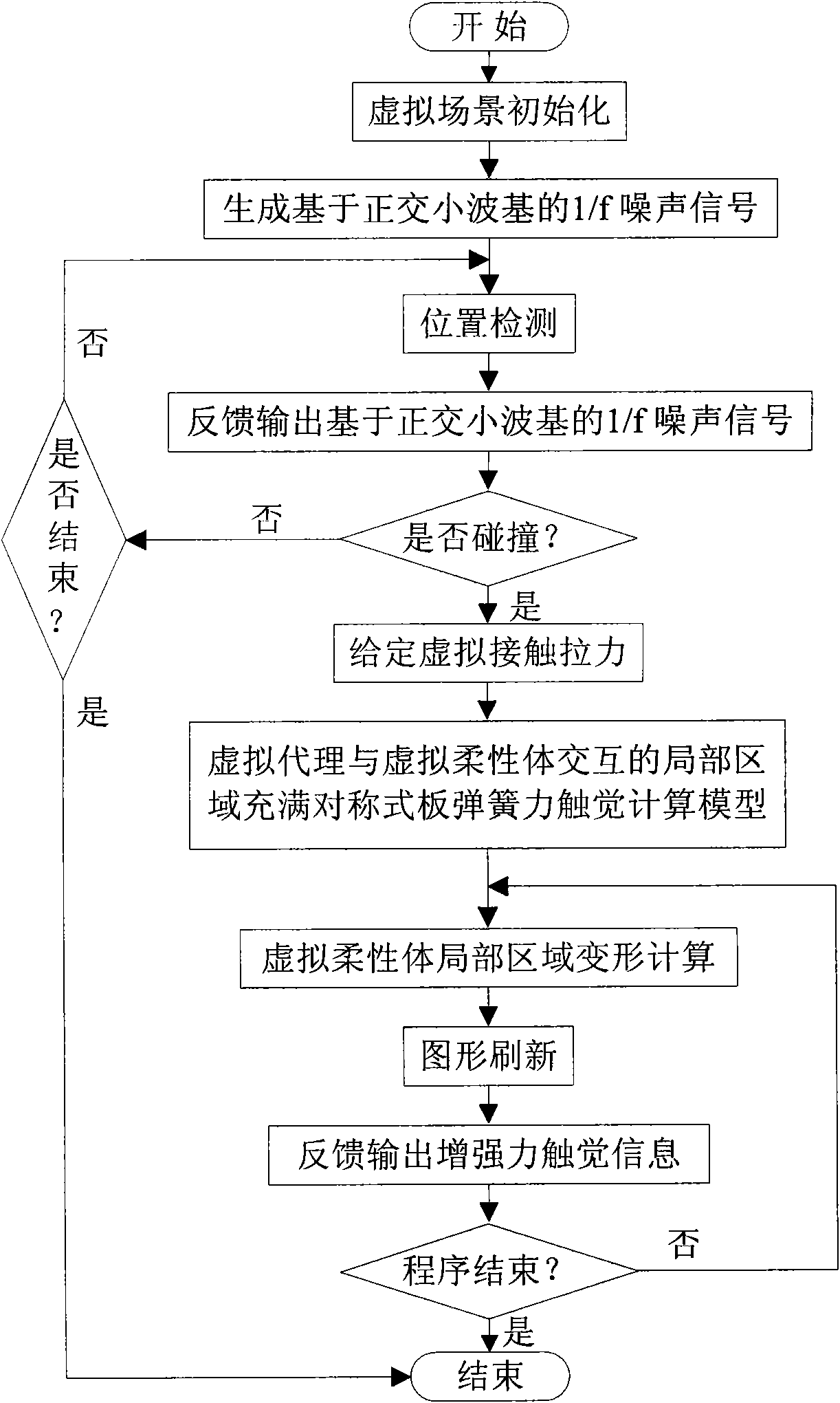
[0057] 1, a kind of modeling method of the symmetrical leaf spring virtual model that strengthens force tactile reproduction, it is characterized in that the main steps of this modeling method are as follows:
[0058] Step 1 initializes the virtual scene;
[0059] Step 2 When it is detected that the virtual agent collides with the virtual flexible body, that is, in the process of approaching the virtual flexible body, the feedback output is based on the 1 / f noise signal of the orthogonal wavelet base, which can be synthesized through the stochastic process of the Karhunen-Loeve expansion express:
[0060]
[0061] Among them, x(t) is the 1 / f noise signal based on the orthogonal wavelet basis, is a set of uncorrelated, zero-mean random variables with variances satisfying
[0062] var x n m = σ 2 2 - rm - - ...
specific Embodiment 2
[0093] 1. Construct a virtual straight clamp model and a virtual heart model to realize the initialization of the virtual scene.
[0094] All the virtual medical straight forceps and virtual heart models in this example directly adopt the OBJ format exported from 3DS MAX 9.0 software, and the virtual medical straight forceps and 3000 mass points and 6412 triangle meshes are composed of 612 particles and 1207 triangles. The virtual heart model composed of grids is used as an example to carry out deformation simulation. It is very convenient to obtain and modify the model during the experiment; the operating system is Windows 2000, based on 3DS MAX 9.0 and OpenGL graphics library, on the VC++6.0 software development platform Simulation.
[0095] 2. When the virtual straight clamp is close to the virtual flexible body, the feedback outputs a 1 / f noise signal based on the orthogonal wavelet basis.
[0096] The 1 / f noise signal based on the orthogonal wavelet base can be synthesiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More