Screw-type active-thrust capsule-like robot
A capsule robot and screw-type technology, used in surgery, in-vivo radio detectors, etc., can solve the problems of hydrodynamic film rupture, poor propulsion effect, and sudden reduction in propulsion force, achieving convenient control, low construction cost and use cost, The effect of high drive efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, but the scope of protection of the present invention is not limited to the scope described in the embodiments.
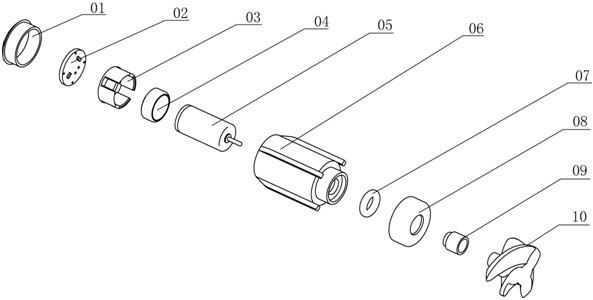
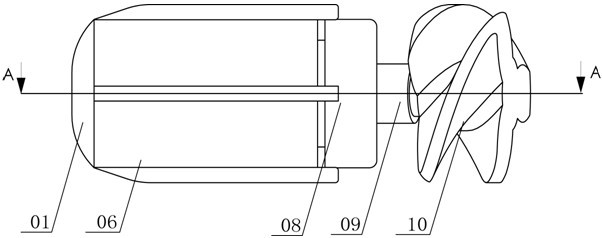
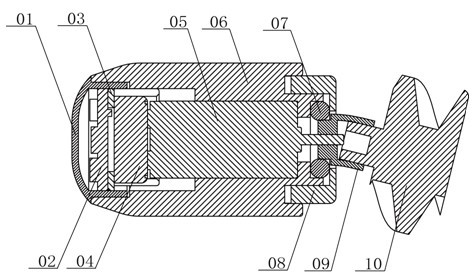
[0024] like Figure 1 to Figure 3 As shown, the screw-type active propulsion capsule robot of the present invention is characterized in that it includes a front cover 01, a control and sensor 02, a battery holder 03, a battery 04, a drive motor 05, a casing 06, a sealing ring 07, a rear cover 08, a flexible Coupling 09, advancing screw rod 10.
[0025] The drive motor 05 is fitted in the front cavity of the shell 06, and the motor body and the inner cavity of the shell are in an interference fit, which can prevent the liquid in the working environment of the robot from entering and affecting the battery, control module, etc. The battery 04 is in the battery holder 03, and one end of the battery 04 is in contact with the drive motor 05; the oth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More