

Flexible dual-drive biomimetic fish with variable drive position
A bionic fish and dual-drive technology, applied in the direction of non-rotating propulsion elements, can solve the problems of poor maneuverability and poor stability, and achieve the effects of simple structure, improved stability, and improved control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
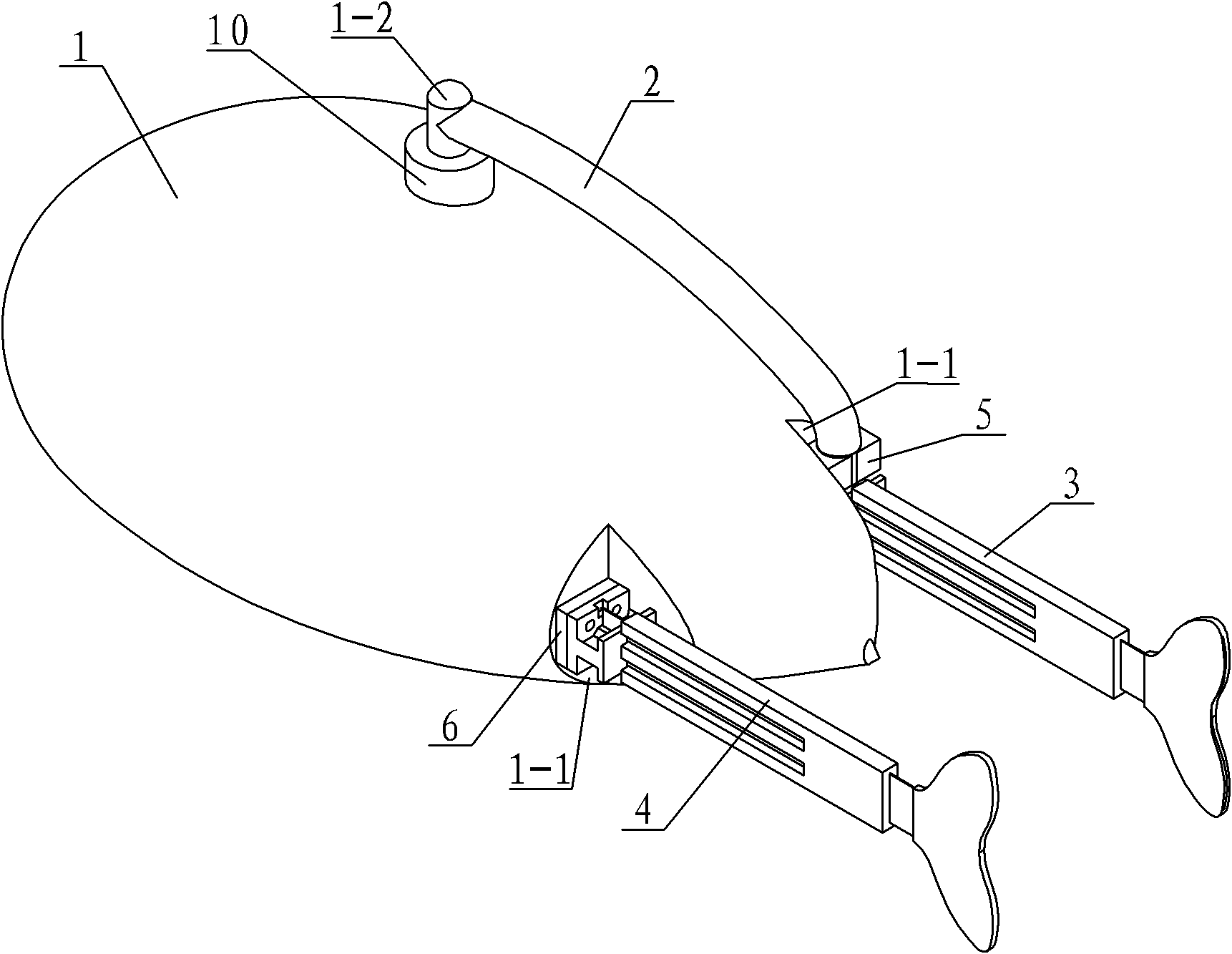
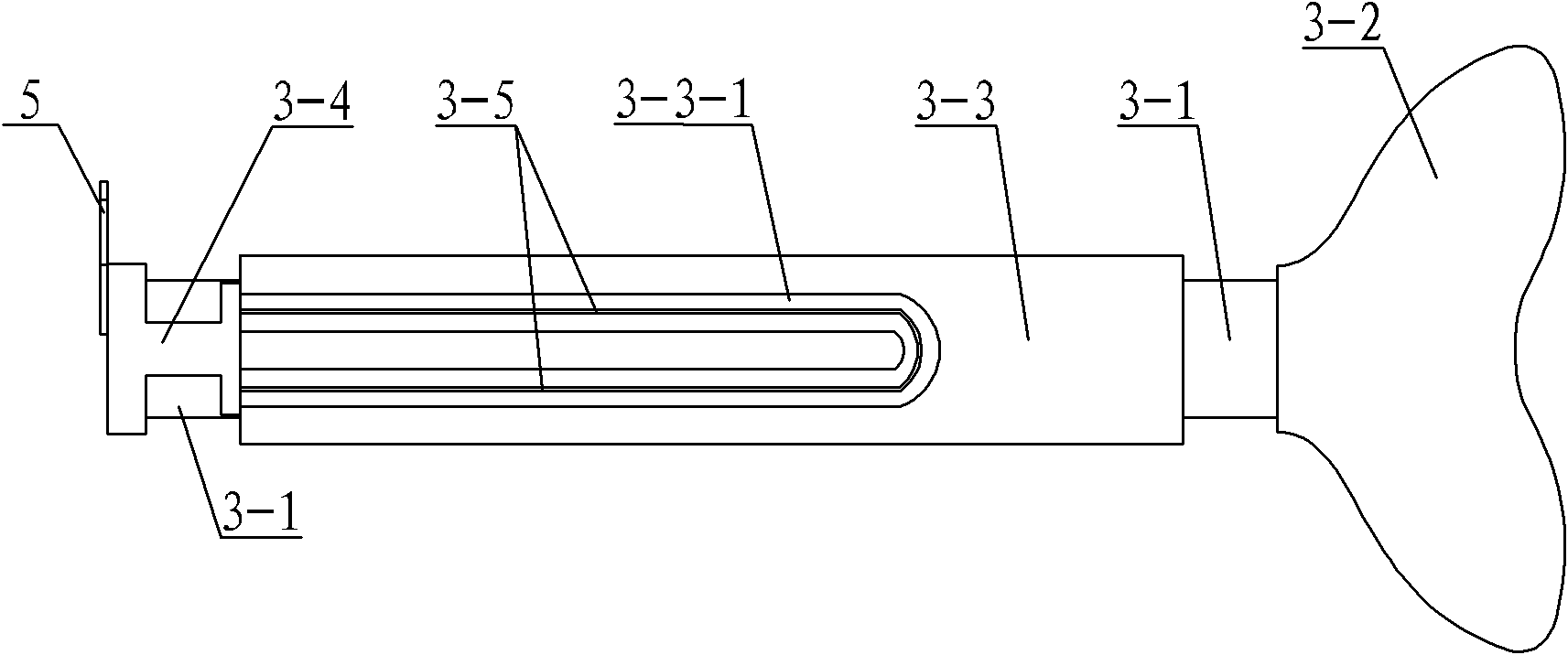
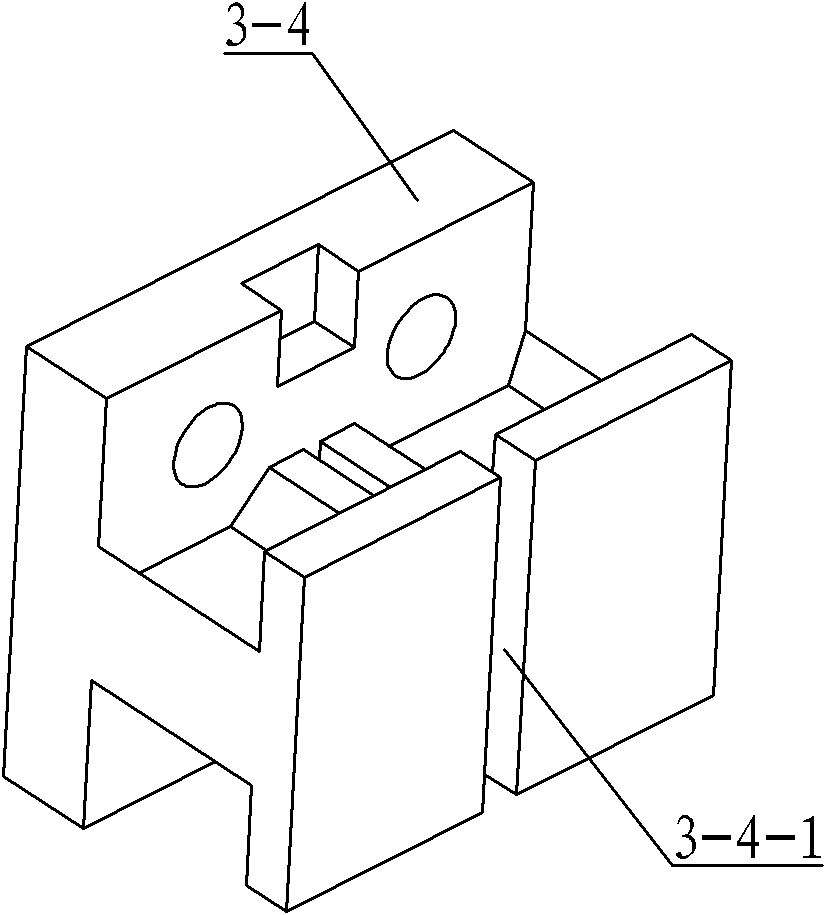
[0007] Specific implementation mode one: combine Figure 1 ~ Figure 3 Describe this embodiment, this embodiment includes bionic fish body 1, rotating beam 2, movable caudal fin driver 3, fixed caudal fin driver 4, connecting piece 5 and spacer 6, movable caudal fin driver 3 and fixed caudal fin driver 4 are all made of elastic substrate 3-1, fish tail 3-2, silica gel layer 3-3, shape memory alloy wire fixing seat 3-4 and two shape memory alloy wires coated with insulating layer 3-5, shape memory alloy wire fixing seat 3- 4. There is a gap 3-4-1 on the outer end surface, and one end of the elastic substrate 3-1 is inserted into the gap 3-4-1 on the shape memory alloy wire holder 3-4, and the other end of the elastic substrate 3-1 One end is connected to the fishtail 3-2, the silicone layer 3-3 is wrapped on the outer surface of the elastic substrate 3-1, and the silicone layer 3-3 on the two outer surfaces of the elastic substrate 3-1 is symmetrically provided with alloy wire g...
specific Embodiment approach 2
[0009] Specific implementation mode two: combination figure 1 To describe this embodiment, the rotating beam 2 in this embodiment is an arched beam. This design can reduce the resistance of the rotating beam 2, thereby reducing the resistance of the bionic fish body 1. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0010] Specific implementation mode three: combination figure 1 Describe this embodiment, the distance between the movable tail fin driver 3 and the fixed tail fin driver 4 of this embodiment is greater than 2.5 times of the maximum amplitude of the movable tail fin driver 3 or the fixed tail fin driver 4 . This design can avoid mutual interference of eddy currents generated when the two fishtails 3-2 swing. Other components and connections are the same as those in the first embodiment.
[0011] Working principle of the present invention: first the ends of two shape memory alloy wires 3-5 coated with an insulating layer on the fixed tail fin driver 4 are all passed through the shape memory alloy wire holder 3-4 on the fixed tail fin driver 4, The gasket 6, the end face of the driver installation groove 1-1 are respectively connected with the drive circuit 8 in the bionic fish body 1; the ends of the two shape memory alloy wires 3-5 coated with an insulating layer on the movab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More