

Software time synchronization method for position and orientation system
A time synchronization and measurement system technology, applied in radio wave measurement system, satellite radio beacon positioning system, synchronization, etc., can solve the problem that the overall accuracy of system time synchronization is not high enough, the system time synchronization error jagged jump, clock drift does not follow Problems such as long-term accumulation of time, to achieve the effects of easy real-time alignment, high time synchronization accuracy, and improved time synchronization reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
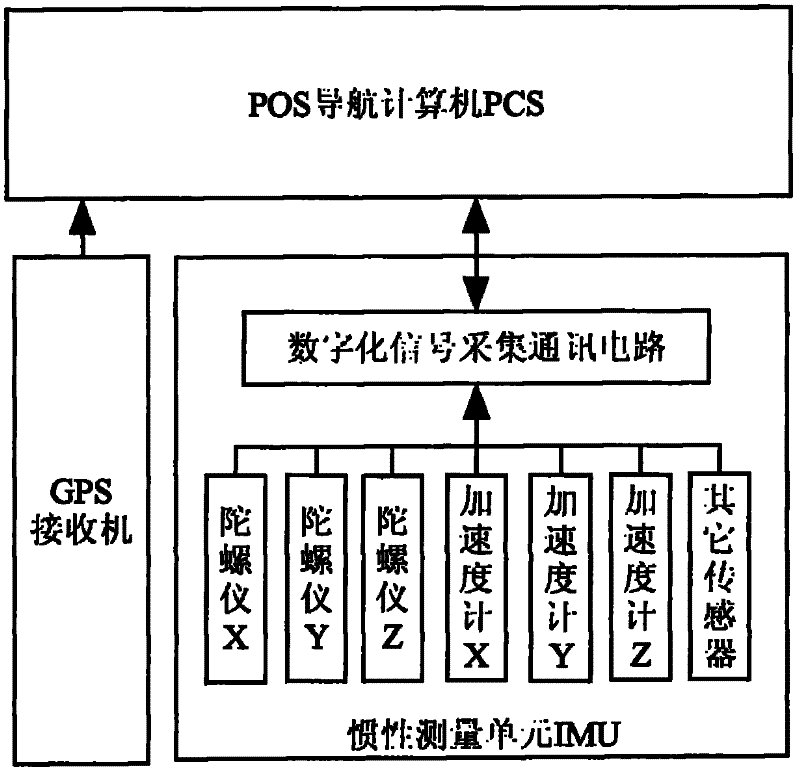
[0034] like figure 2 As shown, the position and attitude measurement system is composed of PCS, IMU, GPS receiver and so on. The IMU consists of three gyroscopes, three accelerometers, other sensors such as temperature sensors, and a digital signal acquisition communication circuit that completes sensor data acquisition and external communication; the IMU works independently and collects data from the gyroscopes and accelerometers , the system clock is obtained by frequency division of the FPGA chip XC3S400-4PQ208C through a 25M crystal oscillator. According to the application requirements, the IMU data acquisition frequency is set to 100Hz. In this embodiment, the PCS adopts the DSP chip TMS320C6713B and the FPGA chip XC3S400-4PQ208C to coordinate the work mode to complete the time synchronization of the PCS and the interaction to the IMU. The time counter of the PCS is set inside the FPGA, and its minimum time resolution is 1 / 25M=40ns.
[0035] The specific embodiment of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More