

Pneumatic muscle flexible elbow joint device with buffer spring and flexible shaft sleeves
A technology of pneumatic muscles and buffer springs, applied in the directions of manipulators, manufacturing tools, joints, etc., can solve the problems of small possibility, large weight of the mechanical arm, limited flexibility, etc., to achieve the effect of ensuring flexibility, alleviating impact, and avoiding injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
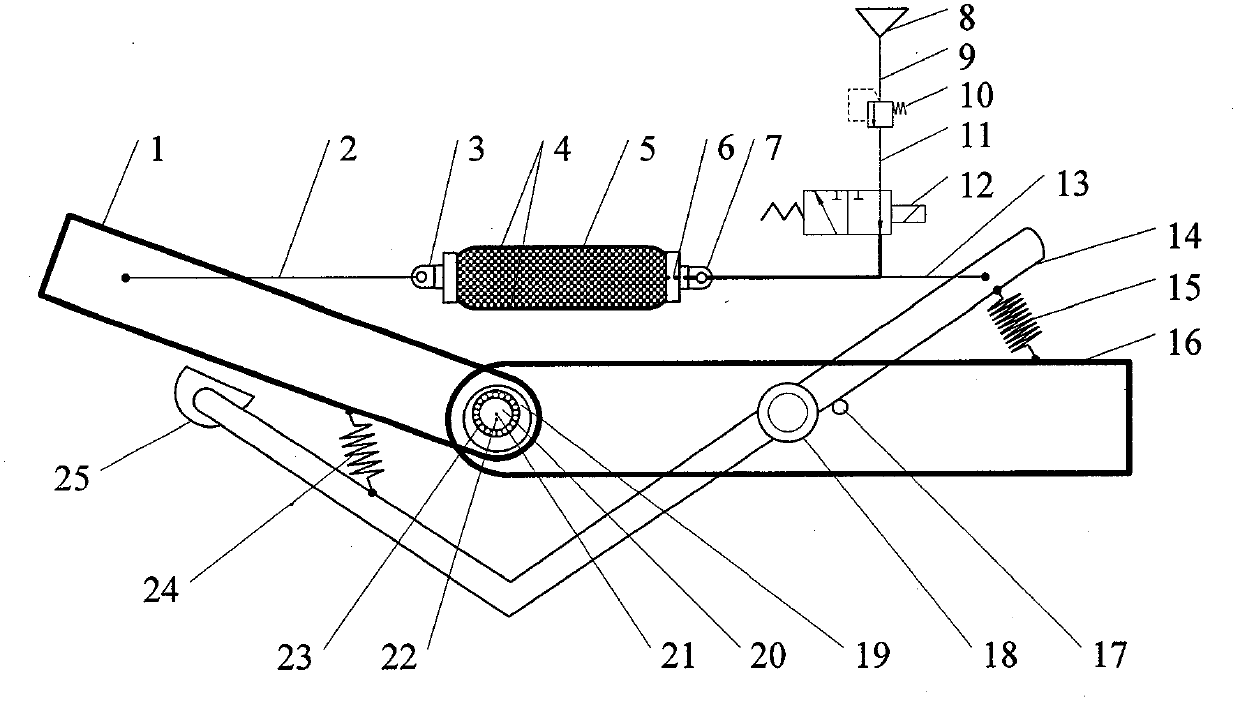
[0022] Such as figure 1 As shown, the pneumatic muscle compliant elbow joint device with buffer spring and flexible bushing is mainly composed of aluminum alloy front connecting rod 1, aluminum alloy rear connecting rod 16, aluminum alloy joint shaft 20, joint bearing 23, flexible bushing 19, pneumatic Muscle 5, aluminum alloy buffer mechanism 14, rubber limit post 17, rubber limit ball 25, buffer bias spring 15 and stretch bias spring 24 form.
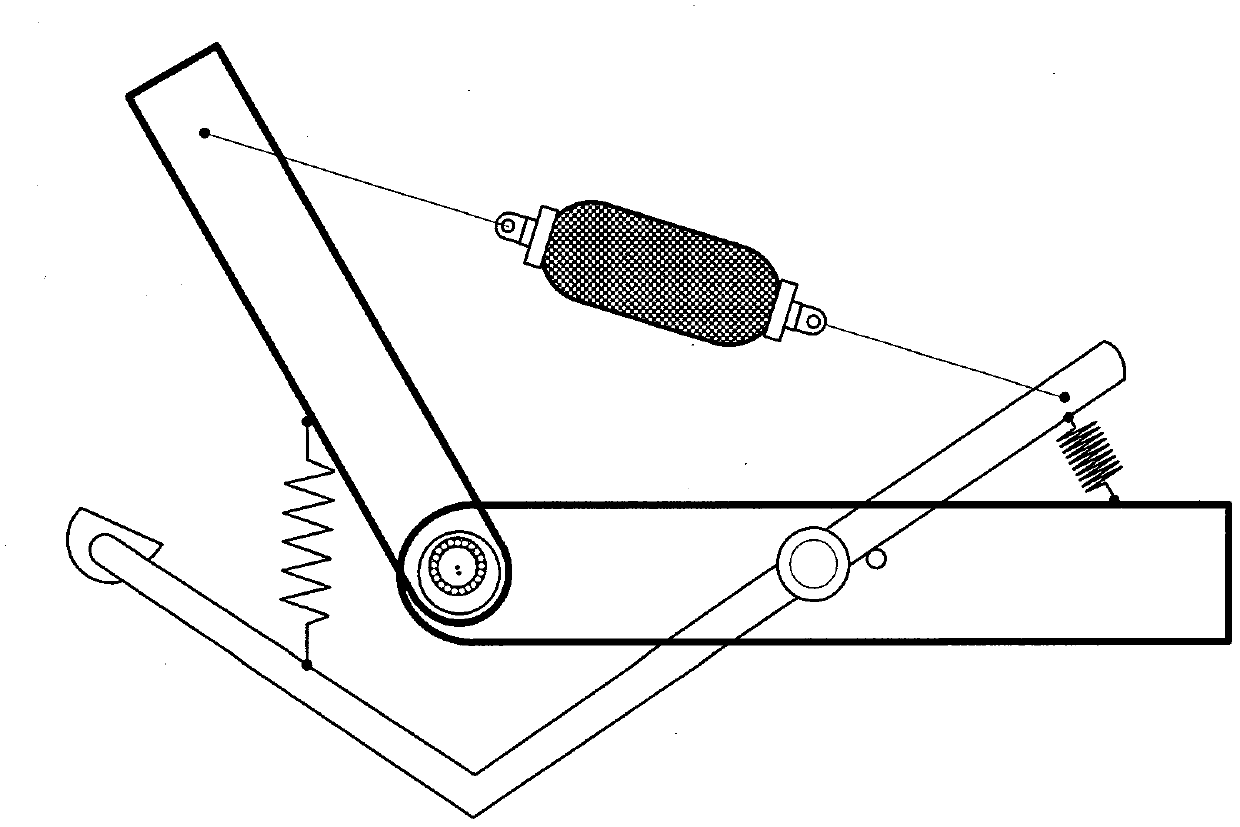
[0023] Such as figure 2 As shown, when the aluminum alloy front link 1 rotates clockwise around the joint shaft 20, the driving part of the pneumatic muscle 5 is the main drive, and the rubber fiber wire outer tube 4 can be used to pass through the pneumatic muscle with high-pressure air; the pneumatic muscle 5 is located on the aluminum The alloy front link 1 and the upper part of the aluminum alloy buffer mechanism 14, the mechanism connector 3 at the left end of the pneumatic muscle 5 and the aluminum alloy front link 1 are fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More