

Three-dimensional grid precision compensation method for industrial robot
An industrial robot and compensation method technology, applied in the direction of instruments, optical devices, measuring devices, etc., can solve the problems of unsatisfactory positioning accuracy of robots, heavy measurement workload, and unsatisfactory results, so as to achieve simple and rapid calculation process and reduce work The effect of improving the absolute positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
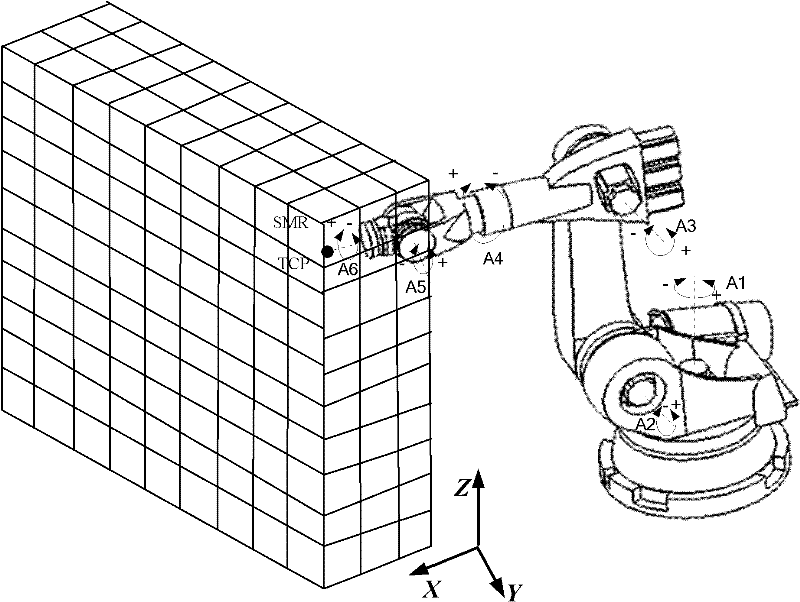
[0023] Such as figure 1 As shown, the steps of the method for compensating the accuracy of the spatial three-dimensional grid used for industrial robots in the present invention are as follows:
[0024] Step 1: within the range of the envelope of the industrial robot, divide the entire envelope space into a series of cubic grids in the Cartesian coordinate system according to the given maximum step size;
[0025] Step 2: Measure and establish the base coordinate system of the robot through the laser tracker, use the theoretical coordinates of the eight vertices of each cube grid divided in step 1 to control the robot for positioning, and the robot is positioned at the eight vertices of the cube grid The attitude is consistent or the deviation is within ±10°, and then the laser tracker is used to measure and record the actual positioning coordinates;
[0026] The steps to establish the association between the laser tracker and the robot base coordinate system are:
[0027] ① ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More