

Universal control method for robotic arm based on deterministic learning theory
A technology for determining learning theory and general control, applied in general control systems, adaptive control, control/regulation systems, etc. truth value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0058] Example: The tracking control problem of a 2-link planar manipulator to a desired periodic trajectory
[0059] (1) 2-link planar manipulator system model
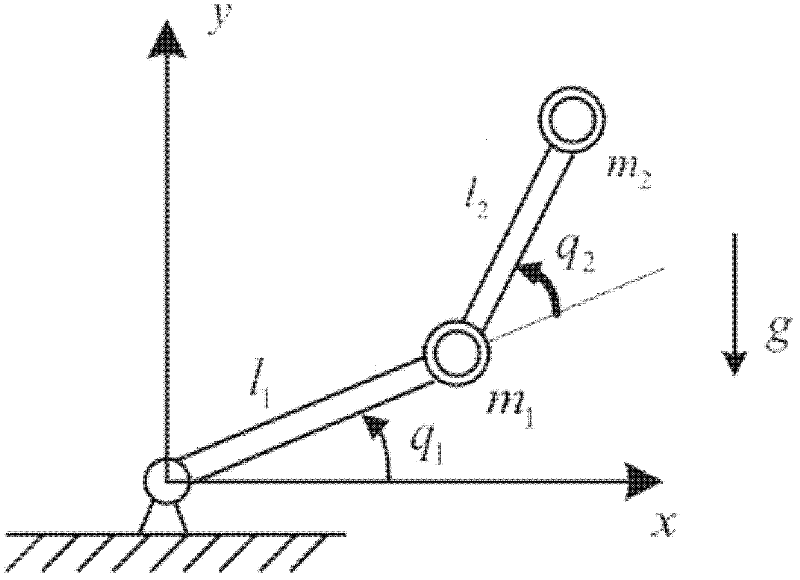
[0060] The structure of the 2-link planar manipulator is as follows: figure 1 As shown, the robotic arm is composed of two connecting rods, and angular displacement sensors and speed sensors are installed at each joint point of the connecting rods to measure the angular position and angular velocity of the joints. The dynamic model of the 2-link planar manipulator is
[0061] X · 1 = X 2 X · 2 = - M ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More