

Distributed driving type electric automobile failure control system based on quadratic optimization
A secondary optimization, electric vehicle technology, applied in the direction of electric vehicles, control drive, electric energy management, etc., can solve the problems of not fully considering the response speed characteristics of the driving motor, not being able to distribute and control the driving force, and not considering sending out part of the driving force. Achieve the effect of maintaining longitudinal driving performance and lateral stability and reducing instantaneous impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
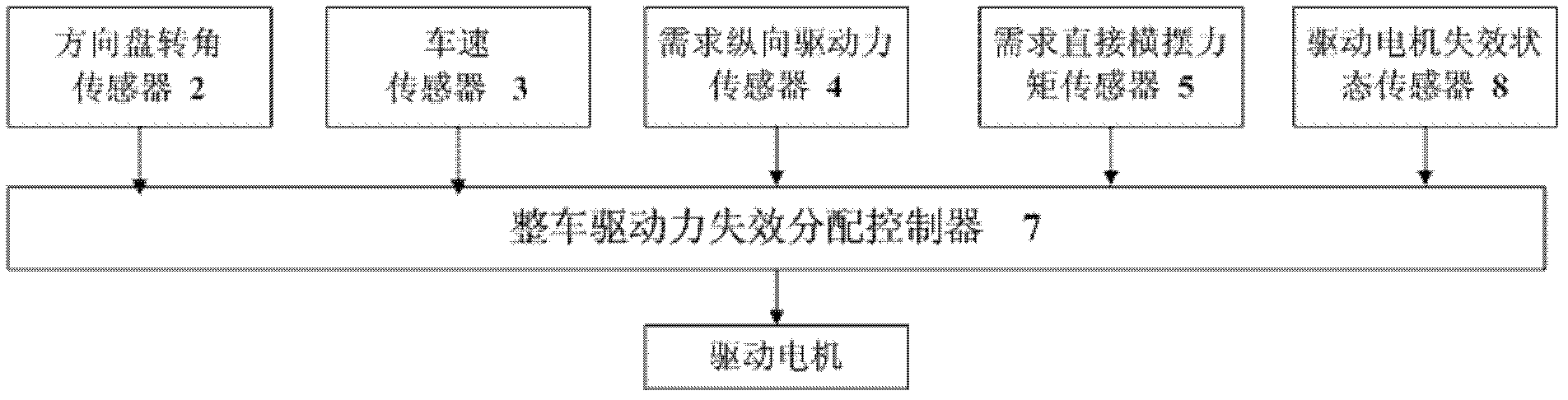
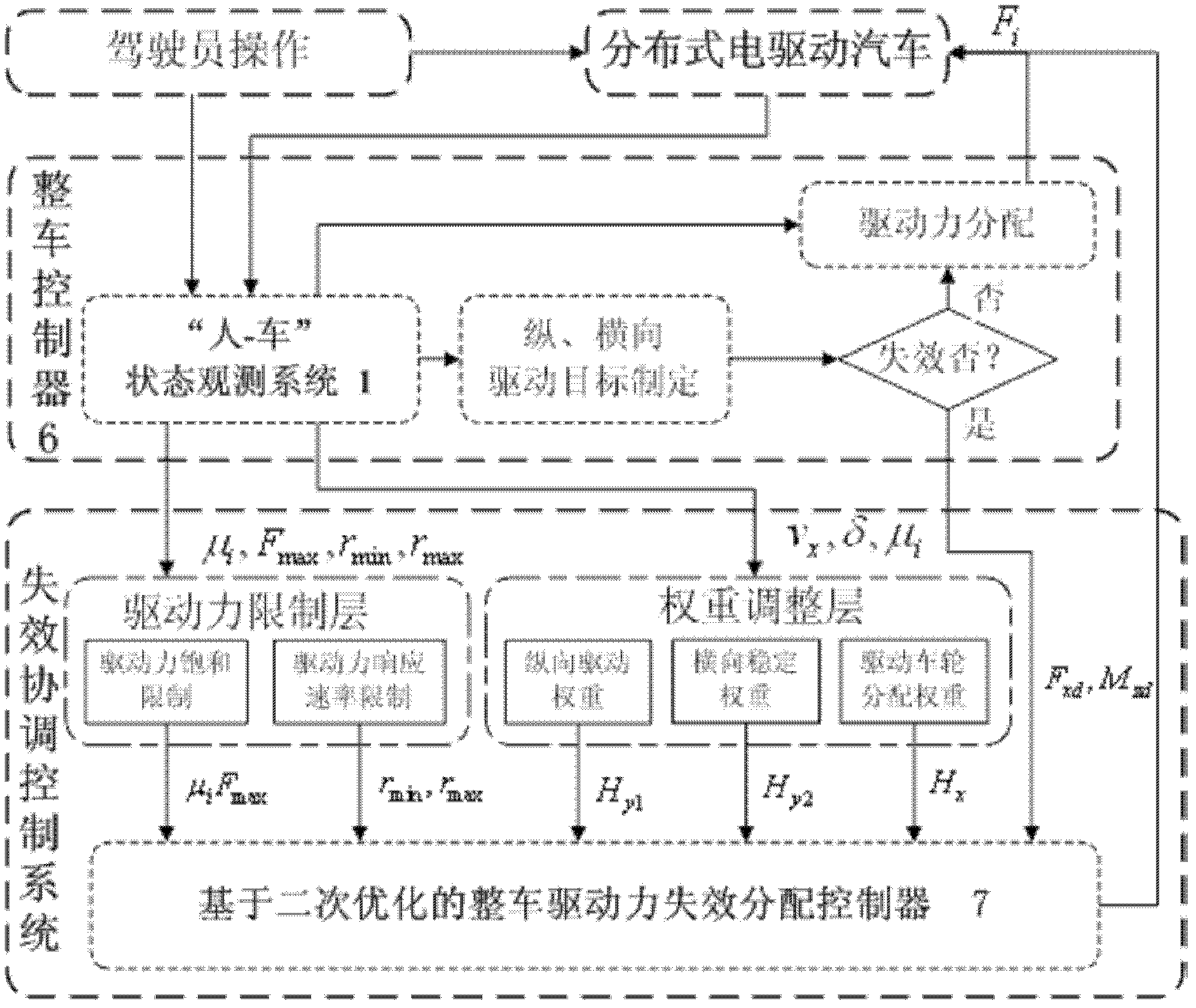
[0015] Such as figure 1 , figure 2 As shown, the distributed drive electric vehicle failure coordination control system of the present invention is similar to the conventional distributed drive electric vehicle driving force coordination control system, including a person-vehicle state observation system 1, a steering wheel angle sensor 2, and a vehicle speed sensor 3 , a required longitudinal driving force sensor 4 , and a required direct yaw moment sensor 5 . The difference between the present invention and the conventional technology is that it also includes a vehicle driving force failure distribution controller 7 based on secondary optimization arranged in the vehicle controller 6 and a driving motor failure distribution controller 7 respectively arranged in the four driving motor controllers. Status Sensor 8.
[0016] When the driver is oper...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More