

Navigation robot obstacle detection method and system
An obstacle detection and robot technology, applied in the field of robot navigation, can solve the problems that the speed of imaging cannot meet the application needs of autonomous mobile robots, the system has poor real-time performance, and the amount of image calculation is large, so as to reduce interference, improve accuracy, and improve detection range. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with accompanying drawing and specific embodiment:
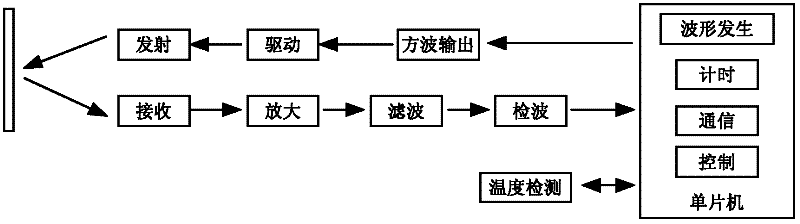
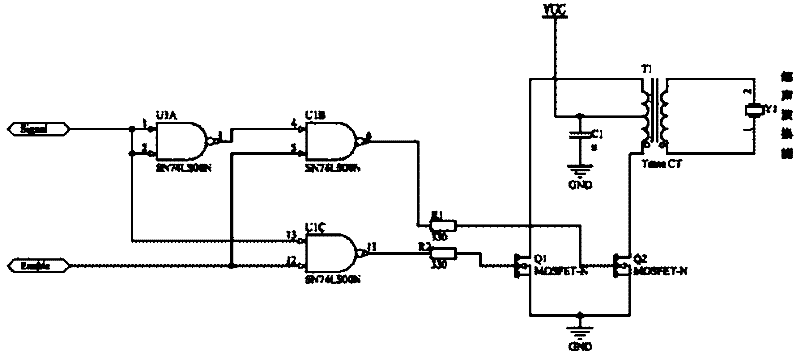
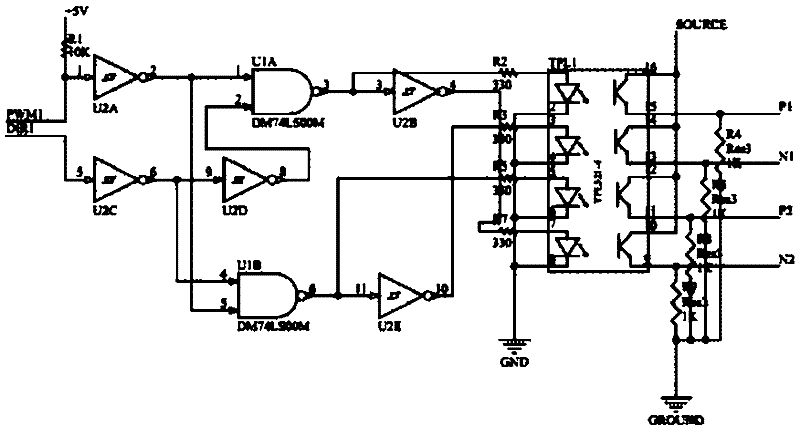
[0039] like figure 1 As shown, the core part of the detection system is the design of the 40kHz high-voltage drive signal generation module and the ultrasonic signal receiving adjustment module: the 40kHz square wave signal through the primary winding is boosted by the transformer, and the peak-to-peak output of the secondary winding is about 100V. Drive signal, using this signal to drive the ultrasonic transmitter, can increase the peak-to-peak signal of 12V to the peak-to-peak signal of 108V, to ensure the output power to drive the ultrasonic transmitter; the signal is relatively weak during the ultrasonic receiving adjustment process and needs to be amplified. AD sampling, the amplification circuit uses the instrumentation amplifier INA129P for the first stage amplification, the amplification factor is 100 times, and then the second sta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More