

Mechanical shoulder joint position control method with dynamic friction compensation
A dynamic friction, robotic arm technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
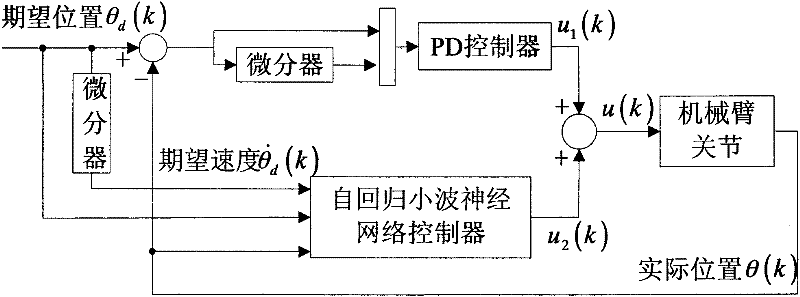
[0056] The overall structural block diagram of the control method involved in the present invention is as attached figure 1 , realized by global control unit and local control unit, where:
[0057] The global control unit is used to complete the trajectory tracking of the manipulator joints in a large range, which is realized by the widely used PD controller in the manipulator joints; the input vector of the PD controller includes the position error and the rate of change of the position error of the manipulator joints;
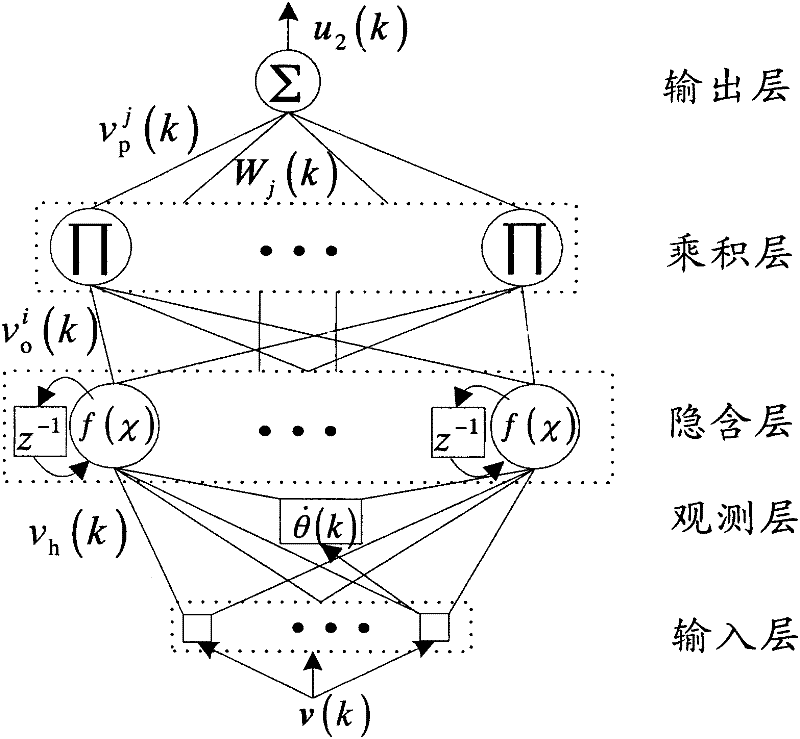
[0058] The local control unit is used to complete the nonlinear dynamic friction compensation in the local small range, which is realized by the five-layer autoregressive wavelet neural network controller with the observation layer; the input vector of the autoregressive wavelet neural network controller includes the expected Position, expected speed and actual position, the actual speed of the manipulator joint required in the autoregressive wavelet neural ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More