

Magnetic navigation routing inspection robot
An inspection robot and magnetic navigation technology, applied in the field of inspection robots, can solve problems such as loss of pre-overhaul, hidden dangers of power grid safety operation, and endangering the safety of inspection personnel, achieving long service life, increased stability, and high accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
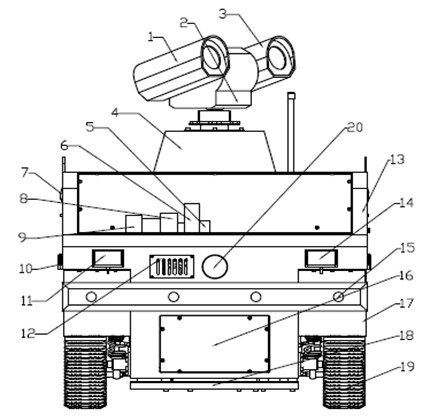
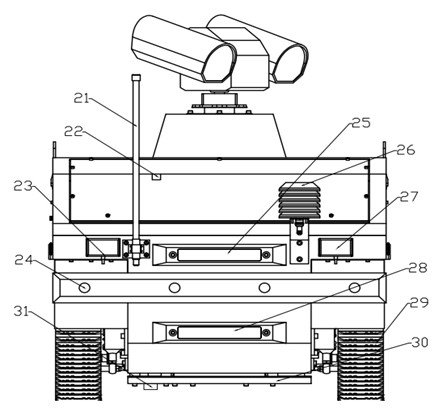
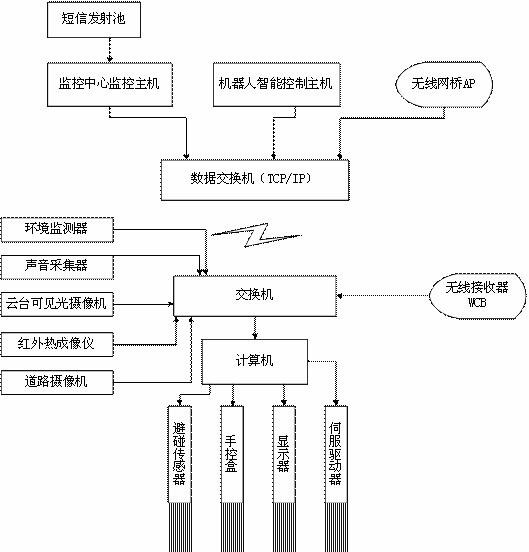
[0011] The invention is a magnetic navigation inspection robot integrating technologies such as multi-sensor fusion, magnetic navigation, image analysis, security monitoring and wireless spread spectrum transmission, and solves multiple technical problems. It includes a crawler chassis, a servo motor connected to it, a computer connected to the motor to control the vehicle body and perform data processing, a HUB connected to the computer, a collision avoidance sensor, a wireless receiving device WCB connected to the HUB, and a network audio system. Video encoder, temperature and humidity collector for collecting internal and external environmental data of the car, network infrared thermal imager, pan-tilt camera connected to the encoder, sound collector, sound output terminal, lithium battery for powering the car, protection equipment Stabilizer. The robot is equipped with a manual control system and an automatic control system, which can realize on-site manual control detecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More