

Three-dimensional registering method based on ToF (Time-of-Flight) depth camera
A technology of depth camera and three-dimensional registration, applied in image data processing, instruments, computing and other directions, can solve problems such as poor applicability, high computational complexity, and difficulty in meeting real-time requirements, and achieve good real-time performance, rich texture information, and practicality. strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
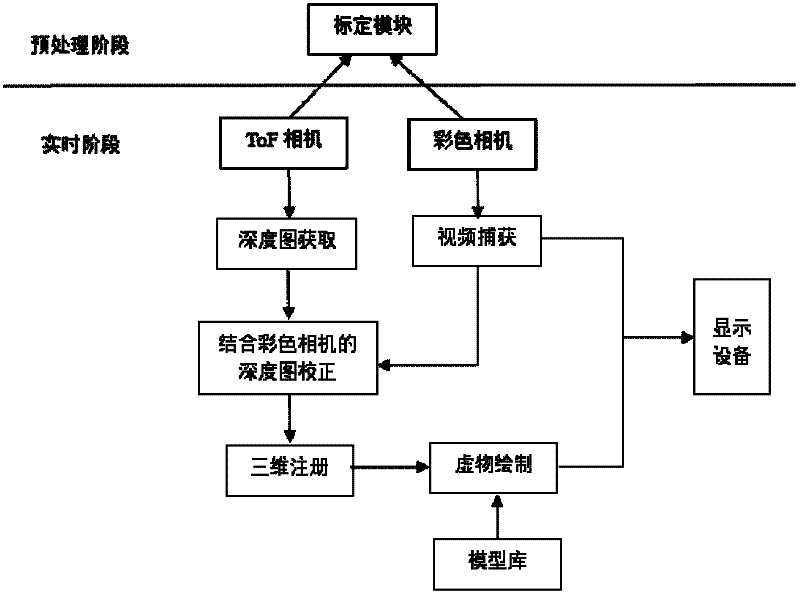
[0019] Concrete steps of the present invention are as follows:
[0020] 1. Construction of the binocular system and calibration of the system
[0021] Place the ToF (Time-of-Flight) camera and the industrial camera horizontally on the quick release plate of the camera tripod so that the fields of view of the two cameras overlap as much as possible. The industrial camera needs to select a model with a field of view close to that of the ToF camera . Use the black and white checkerboard-based visual calibration method to complete the calibration of the internal and external parameters of ToF cameras and industrial cameras. The binocular stereo calibration method is used to complete the calibration of the position between the two cameras. At the same time, the color camera in the binocular camera system is used to complete the collection of reference data, and the B-spline interpolation method is used to interpolate the system error curve, and the curve is used to complete the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More