

Double-arc harmonic wave robot joint
A technology of robot joints and double arcs, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problem of insufficient bearing capacity and torsional rigidity of harmonic robot joints, large stress at the root of involute flexible gear teeth, and lack of visualization of meshing interference Inspection and other issues, to achieve the effect of easy implementation, low noise and heat generation, smooth and executive motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
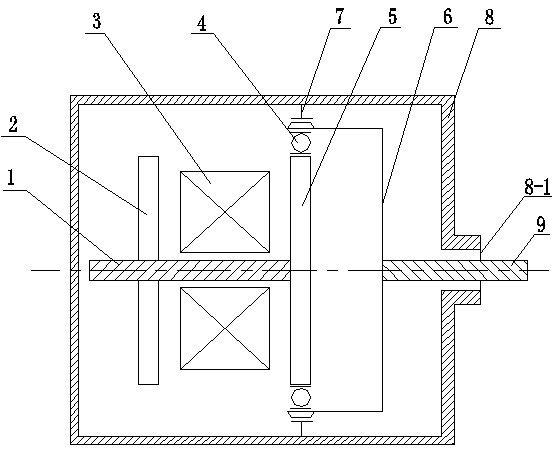
[0010] Such as figure 1 As shown, the present invention connects a rigid double-arc gear 7 in the joint housing 8, meshes a flexible double-arc cup gear 6 in the rigid double-arc gear 7, and passes through the flexible double-arc cup gear 6. The flexible bearing 4 is connected to the wave generator 5 of the double-arc harmonic reducer, and the control end of the wave generator 5 of the double-arc harmonic reducer is connected to the rotor 1 of a synchronous AC servo motor. A stator is also provided outside the rotor 1 of the synchronous AC servo motor, and an encoder 2 is also provided in the synchronous AC servo motor.
[0011] The output rod 9 is connected to the center of the flexible double-arc cup gear 6 , and the output rod 9 is passed through a through hole 8 - 1 of the joint housing 8 through gaps.
[0012] When the number of teeth of the flexible double-arc cup gear 6 is 120, the number of teeth of the rigid double-arc gear 7 is 122, and the modulus is 1. When the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More