

Nonlinear coupling control method for bridge crane based on generalized movement of load
A nonlinear coupling, overhead crane technology, applied in the direction of load suspension components, transportation and packaging, can solve problems such as limiting the practical application performance of overhead crane systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0141] 1. Description of experimental steps
[0142] Step 1. Reference trajectory selection
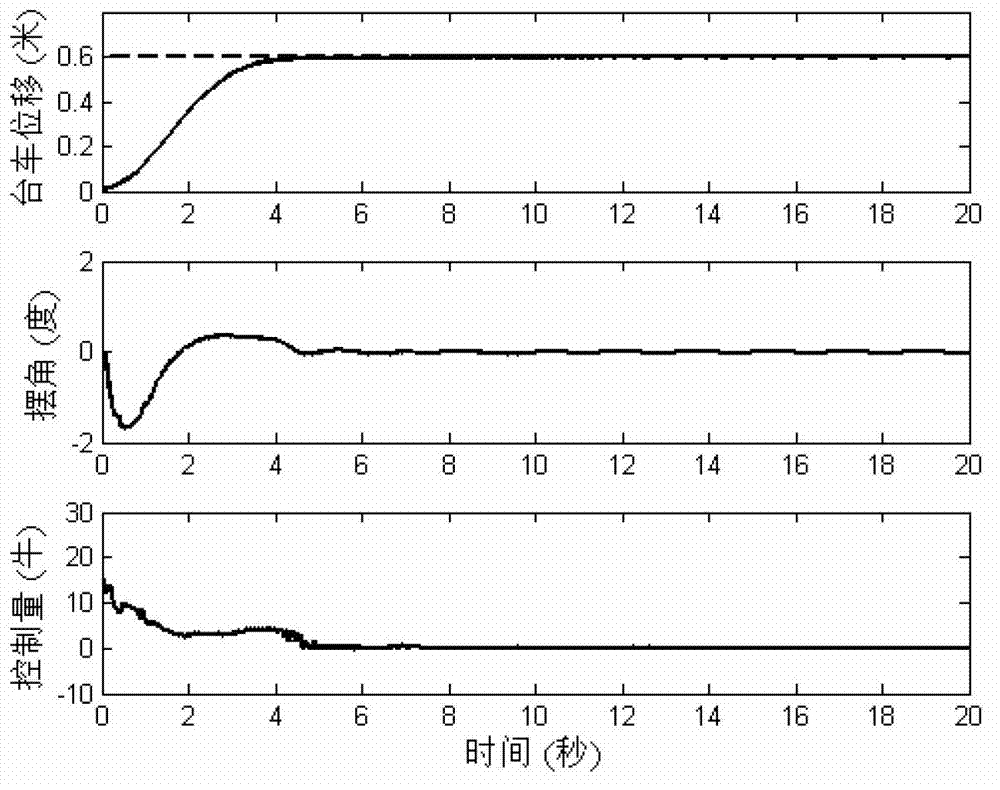
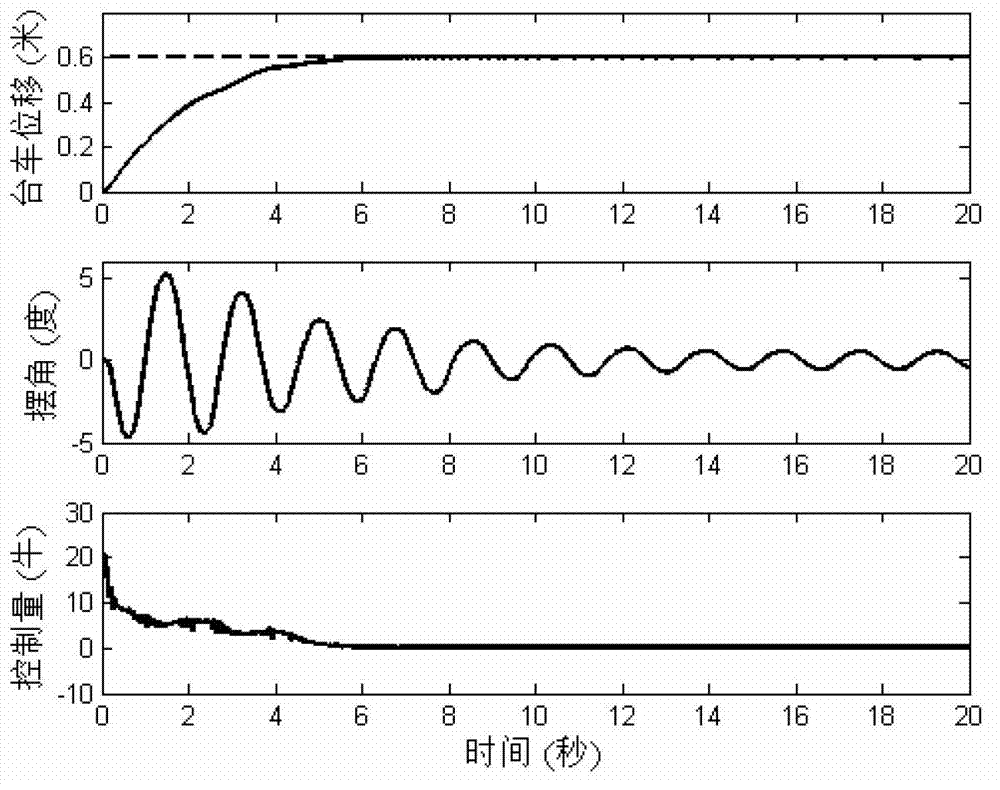
[0143] 1.1, in the stability control, select x d (t) is:
[0144] x d (t)≡p d (42)
[0145] Among them, p d Indicates the target position of the trolley.
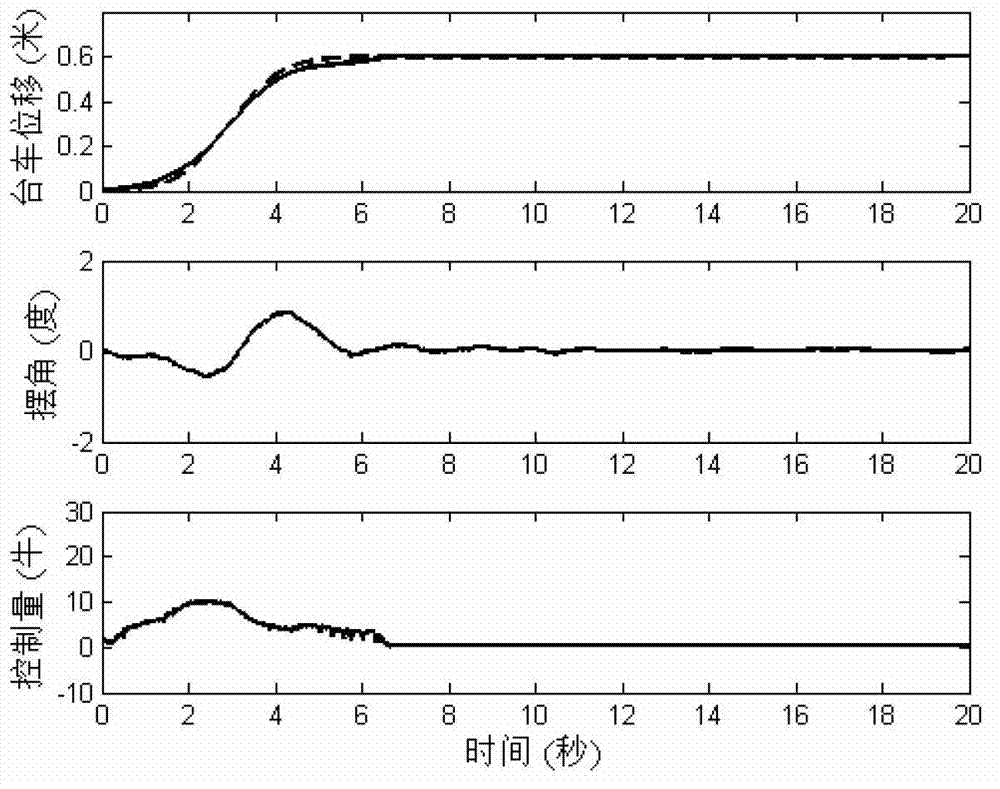
[0146] 1.2. In trajectory tracking control, select the S-shaped curve designed in [10] as x d (t):
[0147] x d ( t ) = p d 2 + 1 2 k 2 ln [ cosh ( k 1 t - ϵ ) cosh ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More