

A Gravity-Gradient-Assisted Localization Method Based on Artificial Physics Optimal Particle Filter
A particle filter algorithm and particle filter technology, applied in the field of measurement, can solve problems such as poor search ability, complex algorithm, and early convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
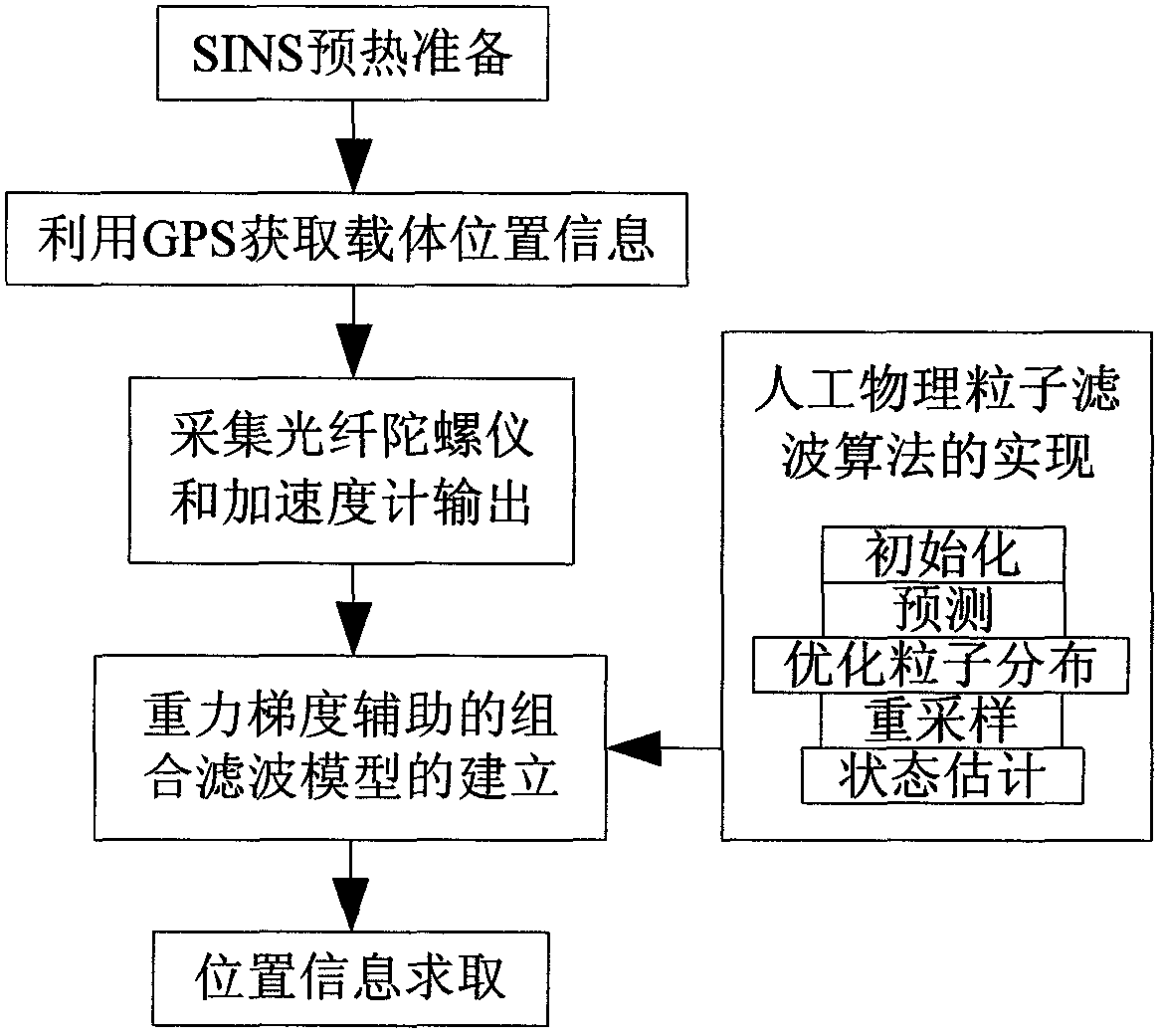
[0047] The specific embodiment of the present invention is described in detail below in conjunction with accompanying drawing:
[0048] (1) Determine the initial position parameters of the carrier by GPS, and bind them into the navigation computer;
[0049] (2) The strapdown inertial navigation system is preheated, and the data output by the fiber optic gyroscope and the quartz accelerometer are collected and processed;
[0050] (3) Realization of artificial physical particle filter algorithm;
[0051] 1) Initialization
[0052] Sample from the posterior probability density distribution with weight reset to 1 / N. Also set perception radius r s , the threshold D of attraction and repulsion th , virtual force coefficient K a1 、K a2 , the number of iterations and other parameters, the perception matrix c, the virtual force matrix F and the current number of iterations are set to zero.
[0053] 2) Forecast
[0054] Sample a new set of particles from the sampled importance d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More