

Pediculus arcus vertebrae internal fixation operation navigation system based on structured light scanning
A technology of surgical navigation and structured light, applied in surgery, medical science and other directions, can solve the problems of reducing the stable operation of the system, increasing the complexity of the system, increasing the cost, etc., to eliminate coordinate conversion errors, reduce complexity, and improve reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The principle, structure and implementation of the present invention will be further described below in conjunction with the accompanying drawings.
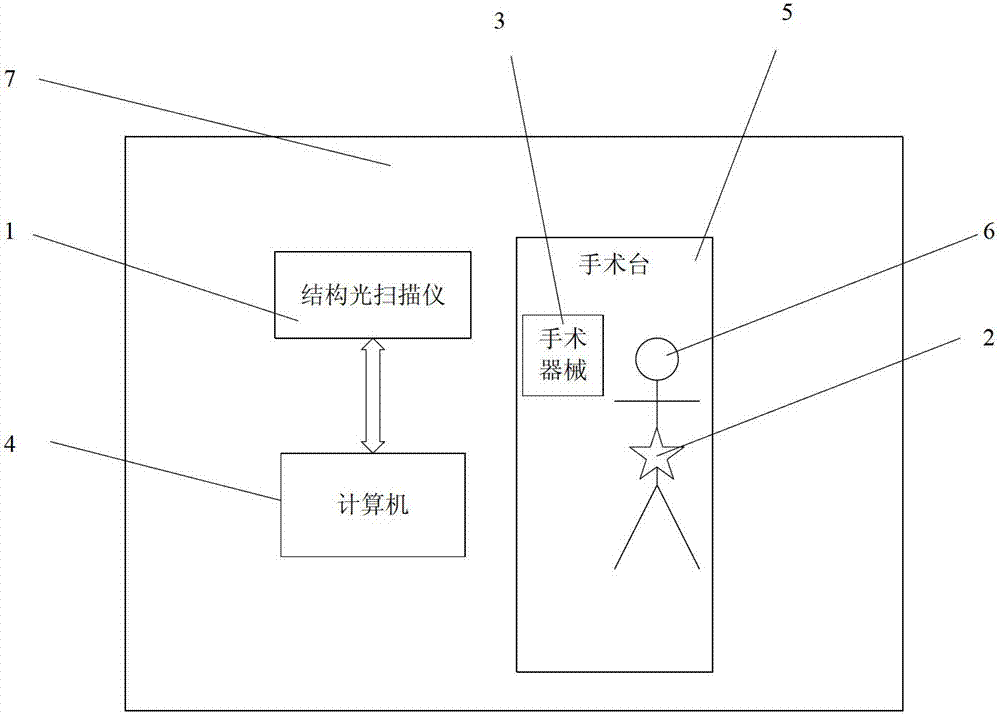
[0038] figure 1It is a schematic diagram of the structural principle of the pedicle internal fixation surgery navigation system based on structured light scanning according to the present invention. and the computer 4 of the CT three-dimensional model of the affected bone from the preoperative CT scan. In the operating room 7 there is an operating table 5 on which a patient 6 is located.
[0039] Since the posture of the patient may change at any time during the operation, a dynamic reference 2 is clamped on the patient's affected bone, and the dynamic reference adopts a structure commonly used in the prior art, such as the dynamic reference used in the publication number CN 101862220A. There are at least 3 non-collinear visible light markers installed on the dynamic benchmark 2. The visible light markers are made of mat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More