

Multi-sensor integration based three-dimensional environment identifying system for walker aid robot
A multi-sensor fusion and environment recognition system technology, applied in the field of information engineering, can solve the problems of inability to achieve obstacle avoidance, no GPS global map navigation, no path planning three-dimensional environment recognition, etc., to achieve effective tracking, reliable walking, and improved intelligence. effect of the program
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with drawings and embodiments.
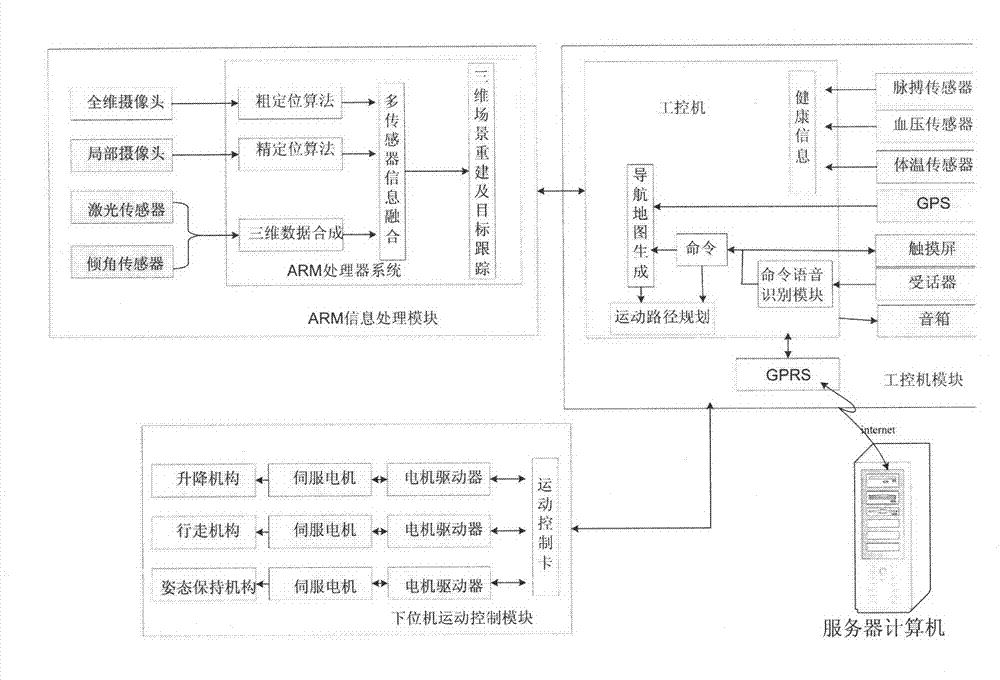
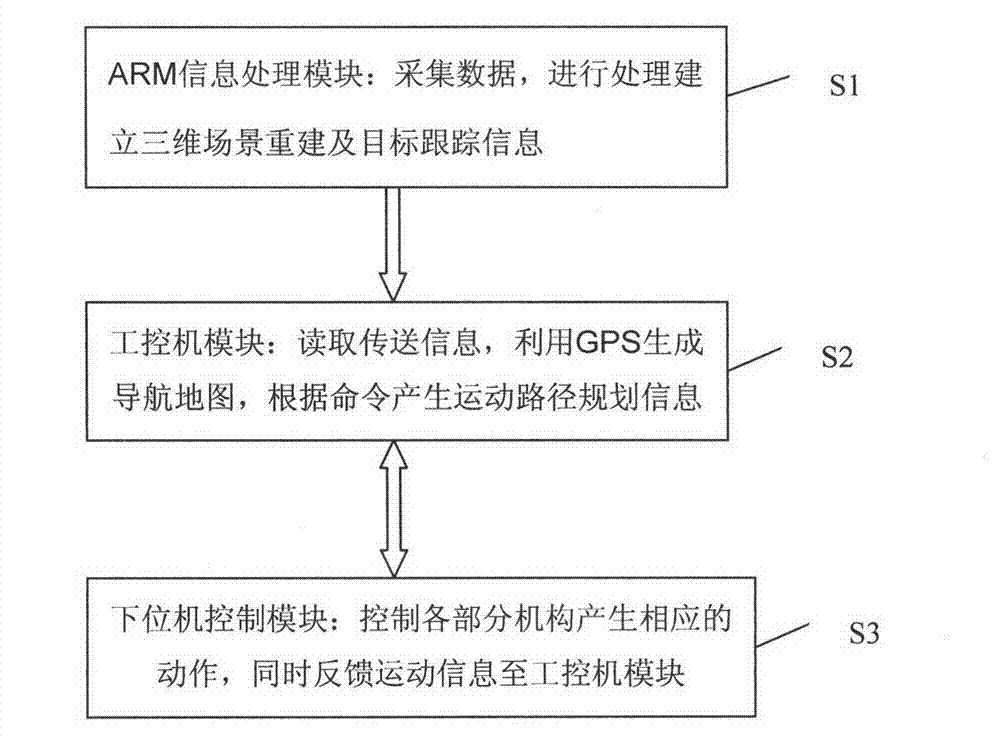
[0031] figure 1 It is a block diagram of the system structure of the three-dimensional environment recognition system of the walking aid robot based on multi-sensor fusion in the present invention, such as figure 1 As shown, the system of the present invention includes an industrial computer module, an ARM information processing module and a lower computer motion control module. The ARM information processing module is connected to the industrial computer module through socket communication; the industrial computer module is connected to the lower computer module through the serial port; the industrial computer module is also connected to the Web server through GPRS to realize the exchange of Web data, and other users can query and assist through the Internet Information about the user of the robot.
[0032] The ARM processor module includes: a full-dimensional camera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More