

Robot eye-on-hand system structured light plane parameter calibration device and method
A system structure and robot technology, which is applied in the field of structured light plane parameter calibration devices based on linear primitives, can solve the problems that the coplanarity of feature points cannot be well guaranteed, the accuracy of light plane calibration is affected, and the operation process is cumbersome. The effect of improving calibration efficiency, reducing labor intensity and avoiding injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
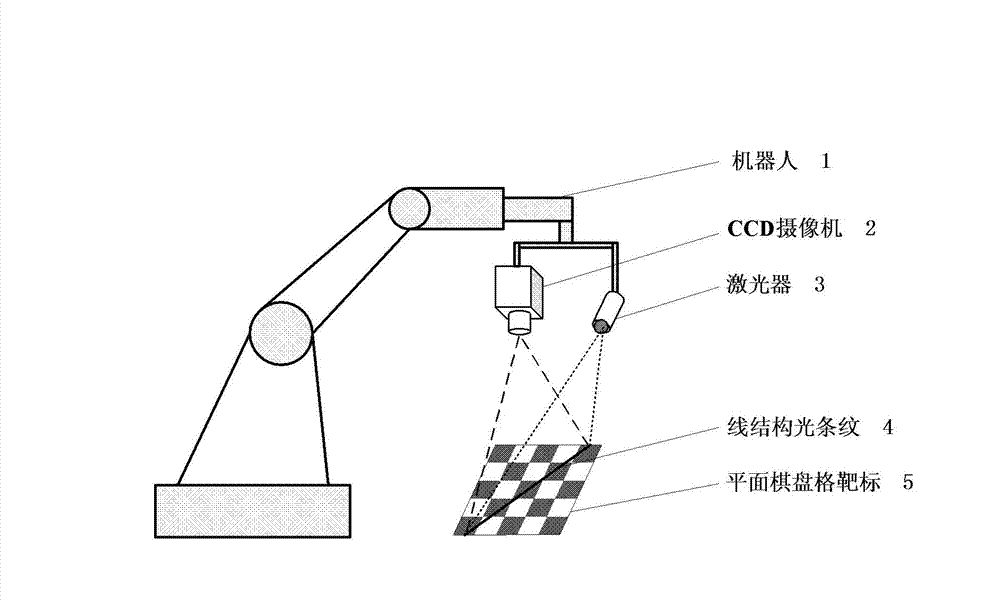
[0025] figure 1 It is a schematic diagram of the robot hand-eye system structured light plane parameter calibration device of the present invention, such as figure 1 As shown, the robot hand-eye system structured light plane parameter calibration device of the present invention includes: a robot 1, a camera 2, a laser 3 and a planar checkerboard target 5, wherein the camera 2 and the laser 3 are fixed at the end of the robot 1 , constitute a robotic structured light vision sensing system; the planar checkerboard target 5 is placed in the calibration area below the camera 2 and the laser 3; by adjusting the pose of the end of the robot 1, the laser 3 A beam of laser plane is projected onto the planar checkerboard target 5...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More