

Magnetic wheel type wall climbing robot with curved face self-adaptation adsorption
A wall-climbing robot and self-adaptive technology, applied in the field of robotics, can solve the problems of engineering application services that fail to detect the health of the spatial grid structure, large steering resistance, large steering radius, and poor steering flexibility, etc., to achieve light weight and load Powerful, simple and compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
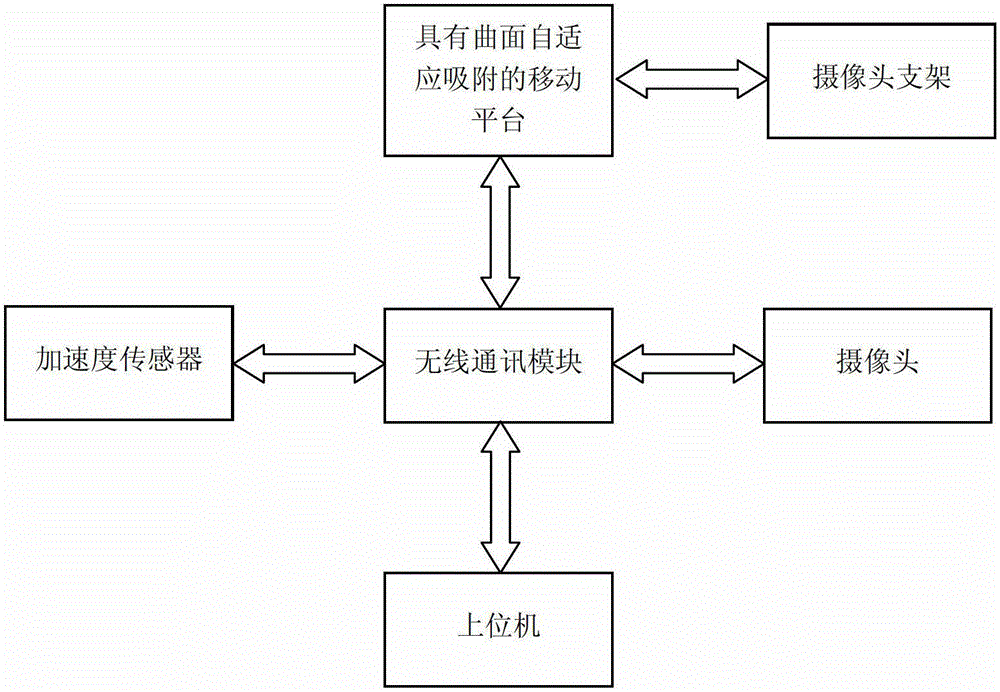
[0031] Such as figure 1 As shown, a magnetic wheel wall-climbing robot with self-adaptive curved surface of the present invention includes a mobile platform with self-adaptive surface adsorption, an acceleration sensor, a wireless communication module, a camera, a camera bracket, a power supply and a host computer. Wherein, the acceleration sensor, the wireless communication module and the camera bracket are all fixed on the mobile platform, the camera is installed on the camera bracket, the camera, the acceleration sensor are connected with the wireless communication module, and the wireless communication module communicates with the host computer wirelessly.
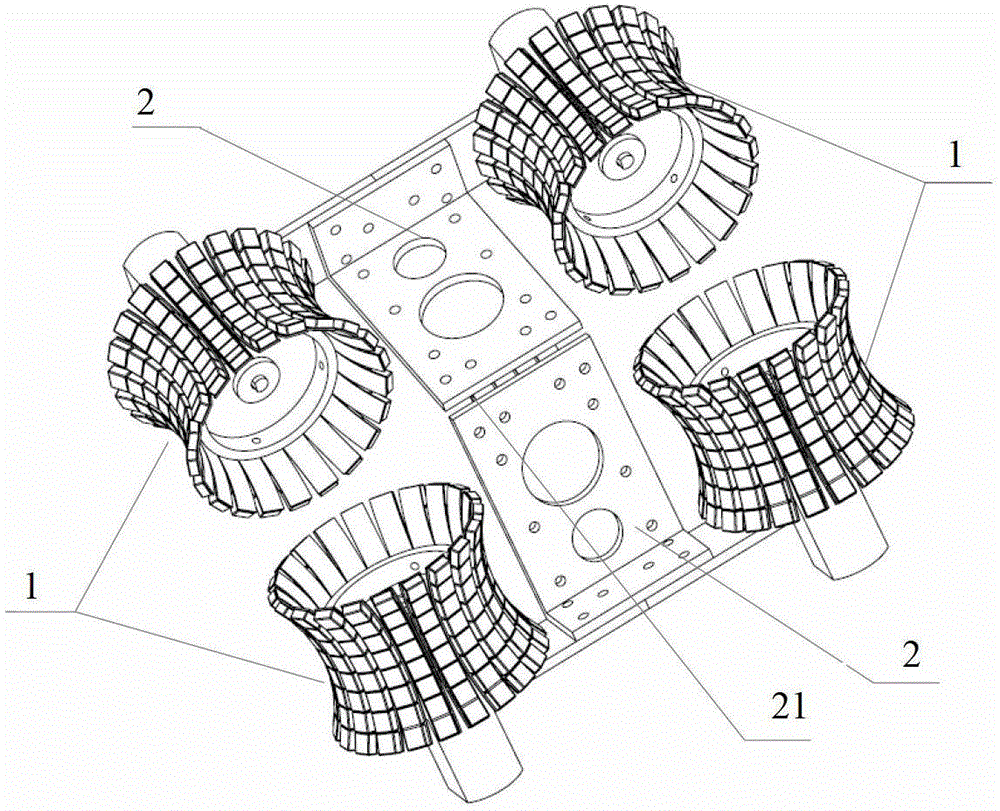
[0032] figure 2 for figure 1 The structural diagram of the mobile platform with self-adaptive surface adsorption in , including two self-adaptive surface frames 2 and four magnetic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More