

Autonomous navigation and attitude measurement device for high speed train
An autonomous navigation and measurement device technology, applied in directions such as navigation through velocity/acceleration measurement, can solve problems such as poor accuracy, poor reliability and stability, poor dynamic performance and temperature performance, and achieve simple structure, high precision, and stability. good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
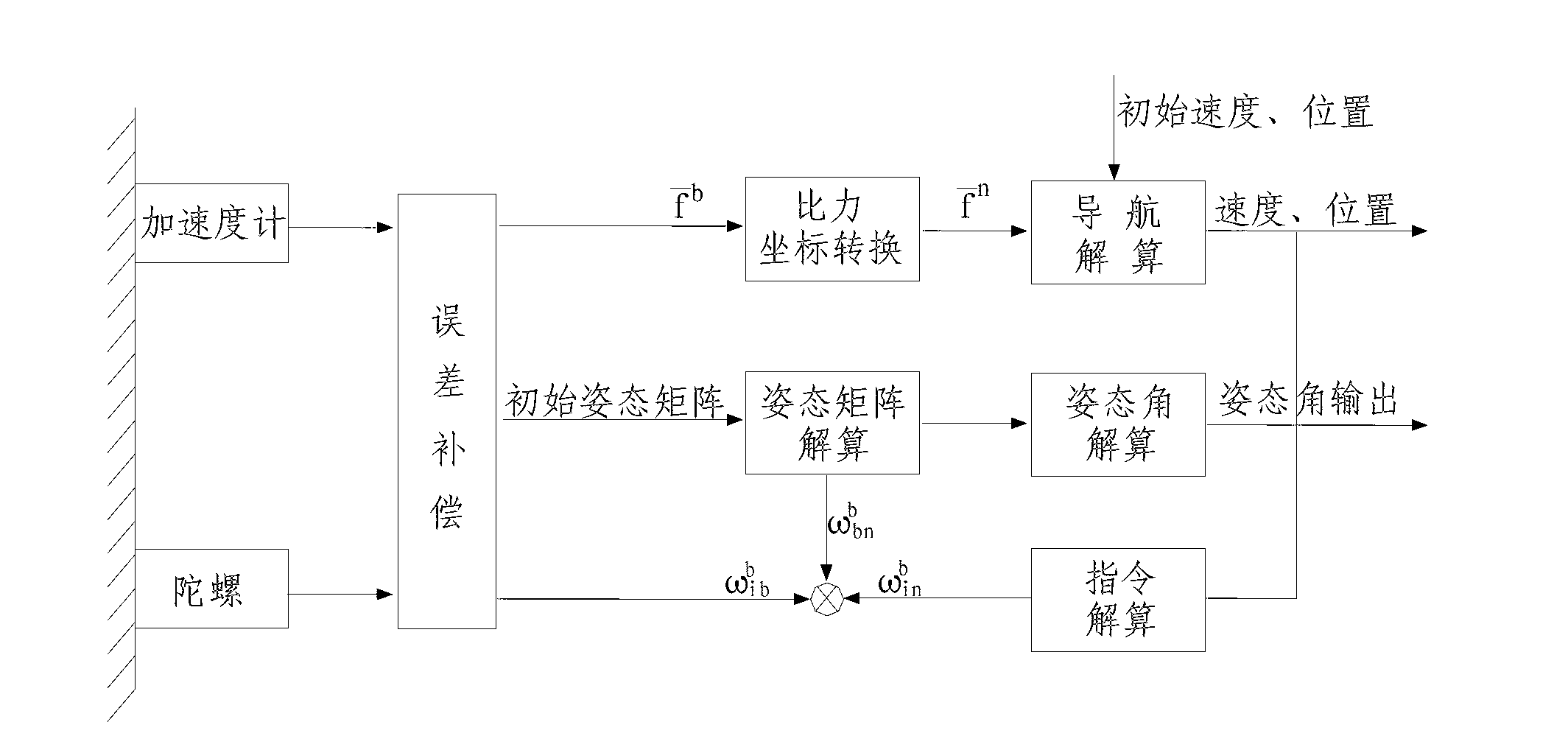
[0013] As shown in the accompanying drawings, it includes a three-axis fiber optic gyro, a three-axis accelerometer, a navigation computer, a temperature control circuit board, a power amplifier circuit board and a power module, and the three-axis fiber optic gyro and the three-axis accelerometer are fixedly connected to the carrier, so The strapdown inertial navigation system does not have a structural platform for the accelerometer to provide a reference for measuring the specific force, but uses an instant correction strapdown matrix as a "platform", and collects the carrier coordinate system (coordinate origin o b At the center of gravity of the high-speed train, x b Pointing forward along the longitudinal axis of the high-speed train, y b The horizontal axis of the high-speed train points to the right) linear acceleration and angular velocity information, and the attitude angle information, velocity and position information of the carrier are determined singly through coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More