

Trajectory tracking sliding mode control system and control method for spraying mobile robot
A mobile robot and trajectory tracking technology, which is applied in the direction of two-dimensional position/channel control, etc., can solve problems such as difficult to control the robot, limited adaptive ability, and affect the trajectory tracking accuracy of the greenhouse mobile robot, so as to achieve rapidity and accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
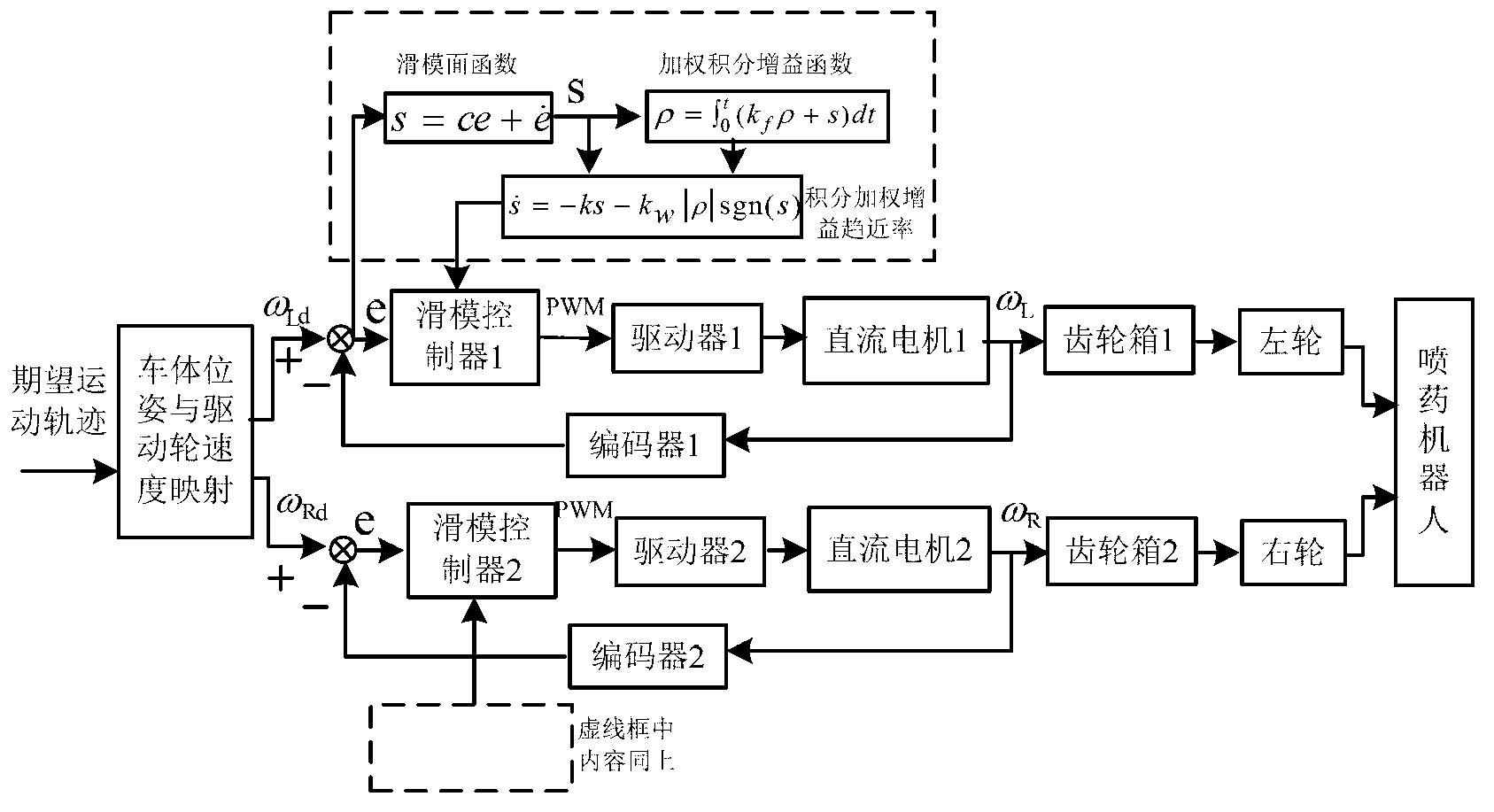
[0071] The control method of the invention mainly focuses on improving the trajectory tracking control performance of the spraying mobile robot in the greenhouse environment by using a sliding mode control method based on the integral weighted gain reaching law. Assuming that the spraying mobile robot is a two-wheel drive robot driven by a DC servo motor, the block diagram of its branch control system is as follows: figure 2 shown.
[0072] The trajectory tracking sliding mode control system for the spraying mobile robot is composed of the body posture and driving wheel speed mapping module, the left wheel control system and the right wheel control system;
[0073] The vehicle body pose and driving wheel speed mapping module is used to determine the vehicle body position and driving wheel speed based on the mathematical model of the controlled object of each driving wheel controller of the wheeled mobile robot with the motor drive shaft interference item and the walking path ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More