

Subsection space aligning method based on homography transformational matrix
A homography transformation and spatial alignment technology, applied in image analysis, image data processing, instruments, etc., can solve problems such as cumbersome calculation process, large range, and easy introduction of errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0041] The present invention provides a method for segmented spatial alignment based on a homography transformation matrix, comprising the following steps:
[0042] Step 1: Establish the relationship between the camera coordinate system and the millimeter-wave radar coordinate system based on the homography transformation matrix:
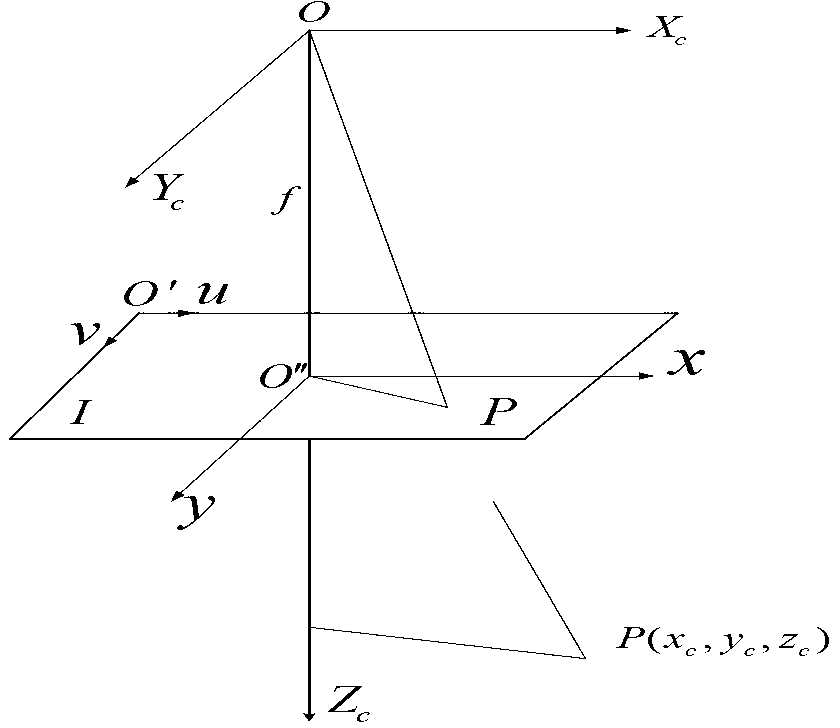
[0043] like figure 1 Shown, OX c Y c Z c Represents the camera coordinate system, the origin O is located at the optical center of the camera; X c The axis is parallel to the scanning line direction of the camera, pointing to the direction in which the scanning pixels increase; Y c The axis is perpendicular to the scanning line direction of the camera and points to the direction in which the scanning line increases; Z c The axis is perpendicular to the imaging plane and points in the direction of the camera line of sight. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More