Trajectory tracking control method and control device for driverless vehicle
An unmanned vehicle and trajectory tracking technology, which is applied in the field of trajectory tracking control methods and control devices of unmanned vehicles, can solve the problem of ignoring the longitudinal and lateral dynamic coupling characteristics of the vehicle, sacrificing the driving performance of the unmanned vehicle, and failing to meet the road requirements. Driving requirements and other issues, to achieve good control effect, improve active safety, and ensure the effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
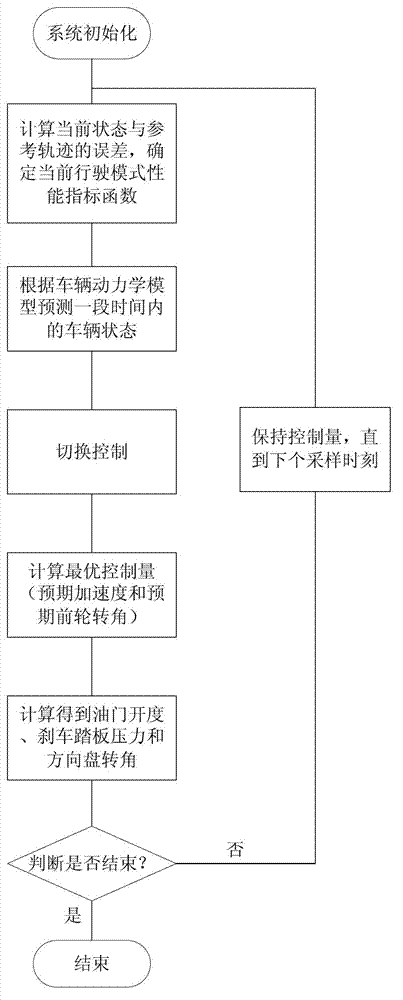
[0044] Such as figure 1 Shown, a kind of trajectory tracking control method for unmanned vehicle, described unmanned vehicle is provided with trajectory generator and vehicle sensor, described trajectory tracking control method comprises the following steps:
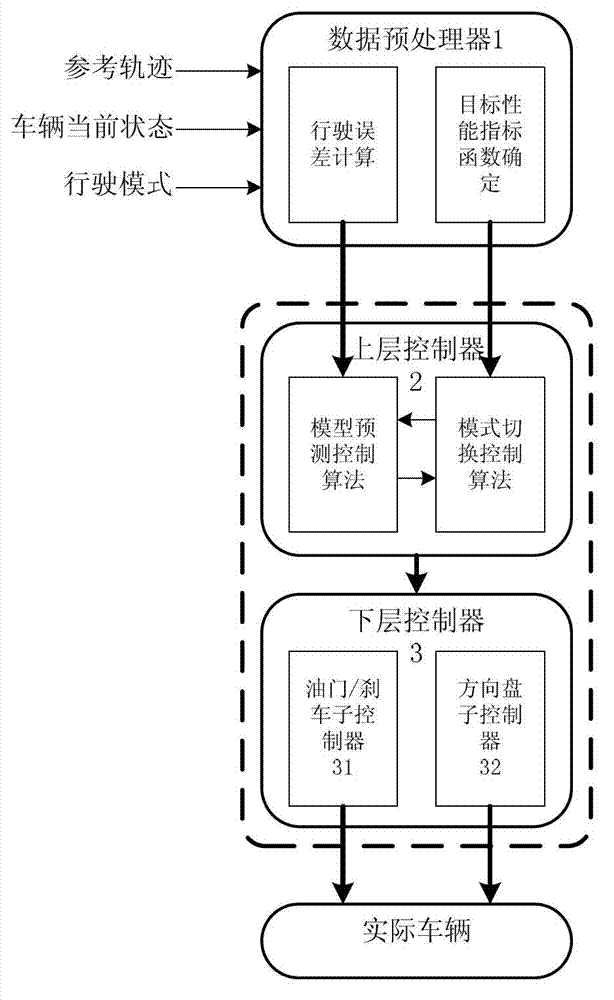
[0045] a. The data preprocessor calculates the error between the current driving trajectory of the vehicle and the reference trajectory based on the reference trajectory generated by the trajectory generator and the vehicle driving information collected by the vehicle sensor. The generator obtains the target performance index function corresponding to the current driving mode, and transmits it to the upper controller;
[0046] b. The upper controller predicts the driving state of the vehicle within a period of time through the vehicle dynamics model according to the vehicle driving information collected by the vehicle sensor;
[0047] c. The upper-layer controller compares the performance index function used at the prev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More