

Tendon type under-driving self-adaptation multi-finger device
An underactuated, self-adaptive technology, applied in the field of bionic robots, can solve the problems of inability to achieve practical application, complex control process, small use range, etc., and achieve the effects of light weight, simple control and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
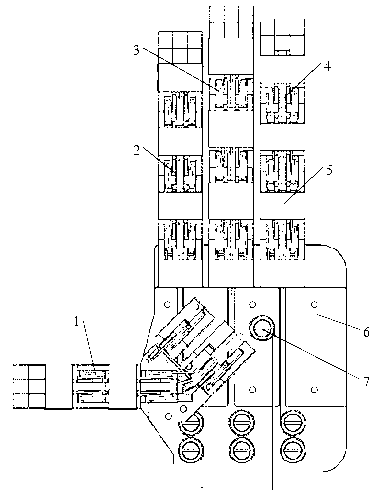
[0037] Such as figure 1 As shown, the present invention includes tendon (37), thumb (1), index finger (2), middle finger (3), ring finger (4) and palm (6), and the end of each finger is fixedly connected with the palm, each Each finger includes three knuckles that are hinged together in turn to form a whole; each hinge is equipped with a torsion spring to form an elastic hinge; the axes of the knuckles of the index finger, middle finger and ring finger are parallel to each other; the last finger of the thumb (1) The shafts of the knuckle joints and the middle phalanx joints are parallel to each other, and the axes of the rotation shafts of the proximal knuckle joints are 135°; the tendons are fixed on the last knuckles of each finger, and are guided to the guide grooves or guide pulleys of the palm through the pulleys at the knuckles; There are guide t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More