

Robust neural network control system for micro-electro-mechanical system (MEMS) gyroscope based on sliding mode compensation and control method of control system
A technology of neural network control and micro gyroscope, which is applied in the general control system, control/regulation system, adaptive control, etc., and can solve problems such as low robustness, inconvenience, and system instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to further illustrate the technical means and effects that the present invention takes to achieve the intended invention purpose, below in conjunction with the accompanying drawings and preferred embodiments, the micro-gyroscope robust neural network control system based on sliding mode compensation proposed according to the present invention and The method is described in detail as follows.
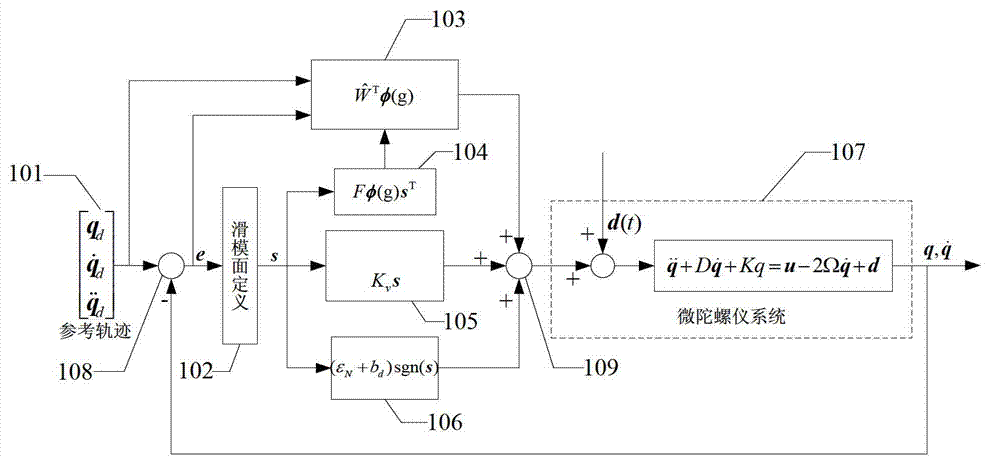
[0060] Such as figure 1 As shown, the micro-gyroscope robust neural network control system based on sliding mode compensation includes:
[0061] Given track generation module 101, is used for outputting the reference track of two-axis vibration of micro gyroscope;
[0062] The sliding mode surface definition module 102 is used to receive the tracking error and generate a sliding mode surface signal output;
[0063] A neural network controller 103, configured to receive a reference track and a tracking error signal, and generate a neural network controller output;
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More