

Vague discrete event shared control method of brain-controlled robotic system
A robot system and discrete event technology, which is applied in the control field of robot shared control and fuzzy processing of discrete events, can solve the problems of low information transmission rate, difficulty in achieving the expected control effect, and time delay of the robot, and achieve enhanced self-adaptability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with accompanying drawing.
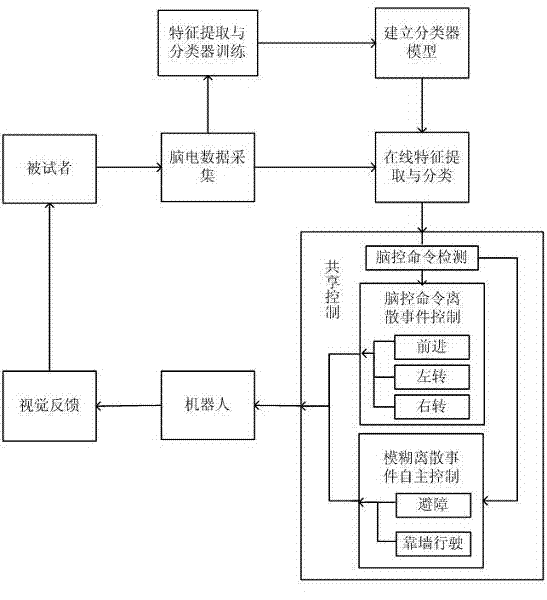
[0044] like figure 1 As shown, the brain-controlled robot system mainly includes EEG data collection, feature extraction and classifier training, establishment of classifier model, online feature extraction and classification, shared control module and robot. The specific working process is as follows:
[0045] The first step is to collect EEG signal training data, and use NeuroScan to collect EEG data at electrodes C3, C4, CZ, FC3, FC4, CP3, CPZ, and CP4. During the collection process, the subjects were required to watch the screen, and when the left arrow, right arrow, and up arrow appeared on the screen, they began to perform motor imagination. The arrow appeared for 4 seconds. The patient rested for 2 seconds, and a total of 90 EEG data were collected in this cycle.
[0046] In the second step, feature extraction and classifier training and establishment of a classif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More