

Non-contact type unmanned vehicle driving state measuring system and measuring method
A technology of unmanned vehicles and driving status, which is applied in the direction of radio wave measurement system, registration/indication of vehicle operation, satellite radio beacon positioning system, etc. Limited and other issues to achieve the effect of convenient follow-up viewing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention. Embodiments of the present invention will be described below in conjunction with the accompanying drawings.
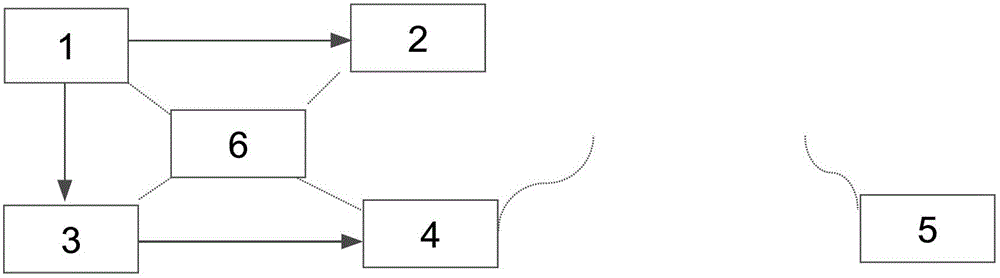
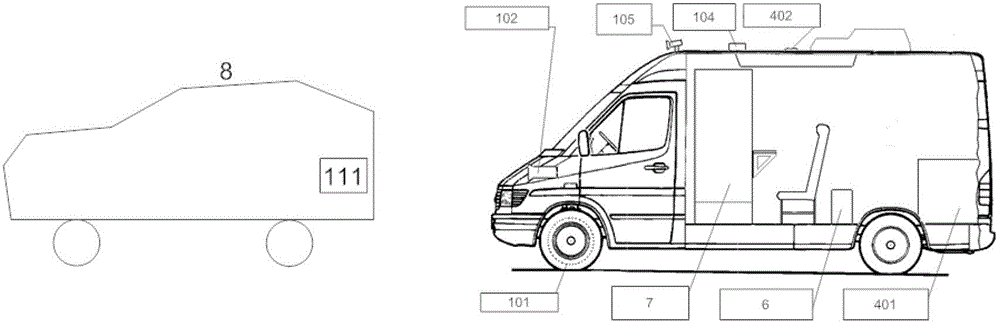
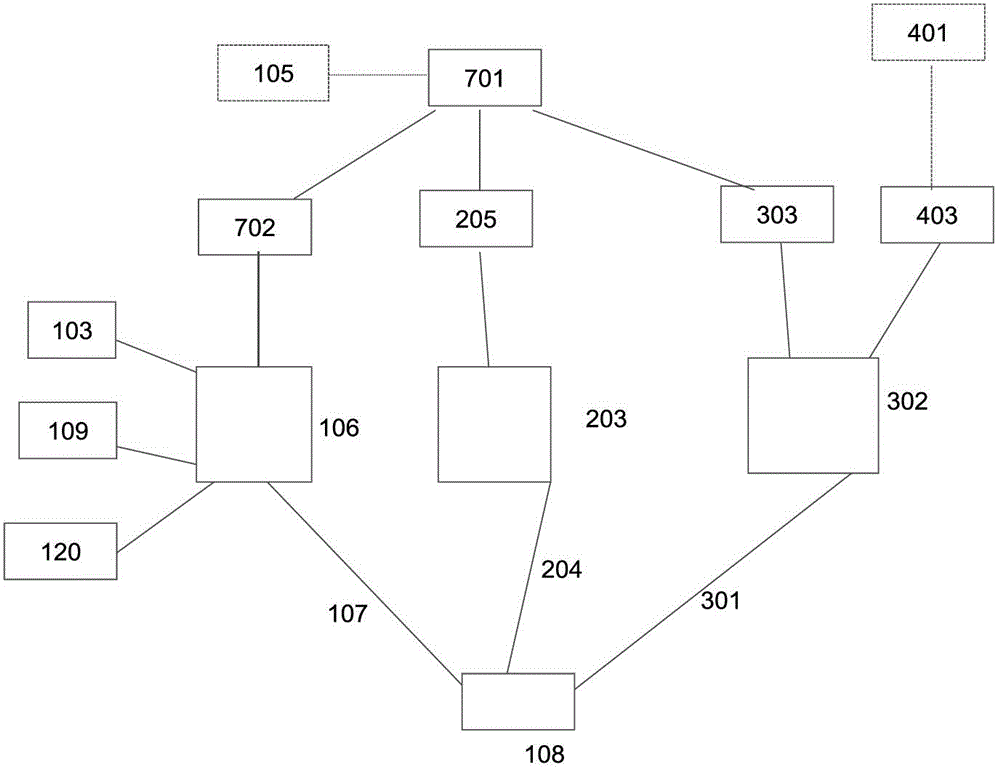
[0063] Such as Figure 1-Figure 3 As shown, the unmanned vehicle driving state measurement system proposed in the present invention includes an unmanned vehicle 8 and a power amplifier type remote electronic tag 111 arranged at the rear of the unmanned vehicle 8, and the manned driver of the unmanned vehicle 8 Vehicle 101, unmanned vehicle driving state measuring device 1, video image recording device 2, comprehensive information display device 3, wirele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More