

Apple fruitlet bagging robot visual positioning method
A technology of robot vision and positioning method, applied in the field of visual positioning system, which can solve problems such as difficult positioning, low robustness, and strong limitations of visual positioning system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0085] Preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
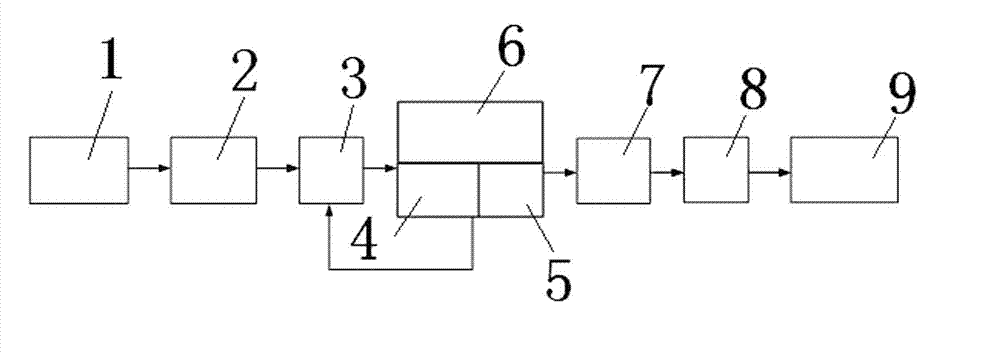
[0086] For connection methods of various devices, see figure 1 , the apple bagging robot visual positioning method based on machine vision of this preferred embodiment needs to simulate human eyes, i.e. a binocular camera, and requires higher camera configuration requirements, and general camera devices cannot meet the requirements, so it is required A kind of binocular camera device 2, what choose in the present invention is industrial CCD binocular camera, it is installed on the bagging robot, is used for collecting the image of apple fruit tree and apple young fruit, and the image storage that it gathers to storage device 3. The image processing program 4 in the processor 6 reads the two images captured by the left-eye and right-eye cameras from the storage device 3, performs image processing, and passes the processed data to the positionin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More