

Distributed type control system of hydraulic quadruped robot and control method
A quadruped robot and control system technology, applied in the field of distributed hydraulic quadruped robot control system and control, can solve the problems that large-scale hydraulic quadruped robots cannot be applied, the robot system is imperfect, and it is difficult to transplant
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045]The present invention is described in detail below in conjunction with accompanying drawing:
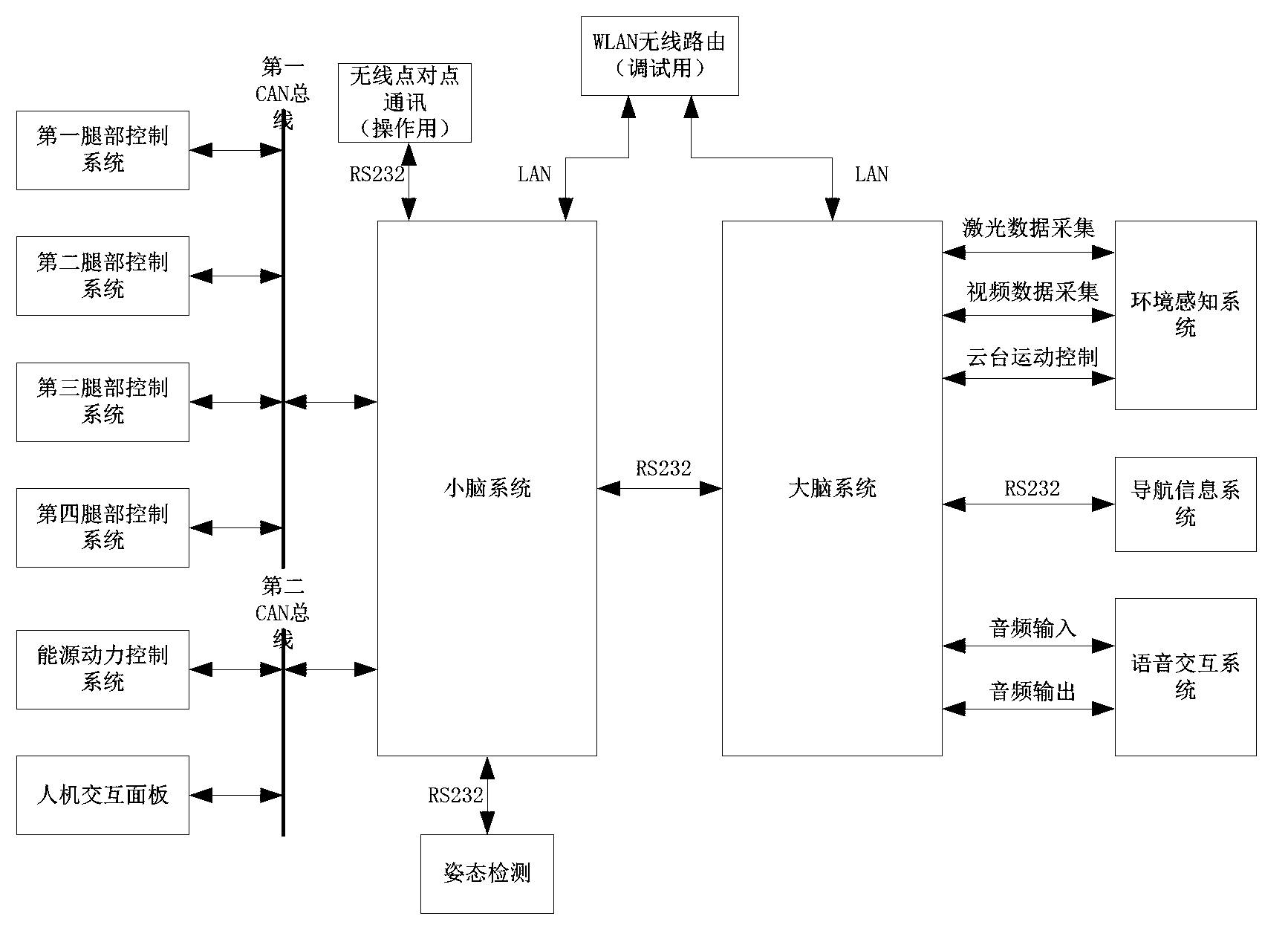
[0046] figure 1 Shown is the block diagram of the control system of the system, the entire control core is composed of the brain system and the cerebellum system. Through two CAN buses, the cerebellum system transmits instructions to the bottom power source of the robot and the leg motion controller, and at the same time collects the operating information of the system in real time.
[0047] The operator can directly issue motion commands to the cerebellum system through wireless point-to-point communication, or communicate with the robot’s brain system through WLAN or voice interaction, and the robot’s brain system will make its own judgment and automatically issue motion commands to the robot’s cerebellum system.
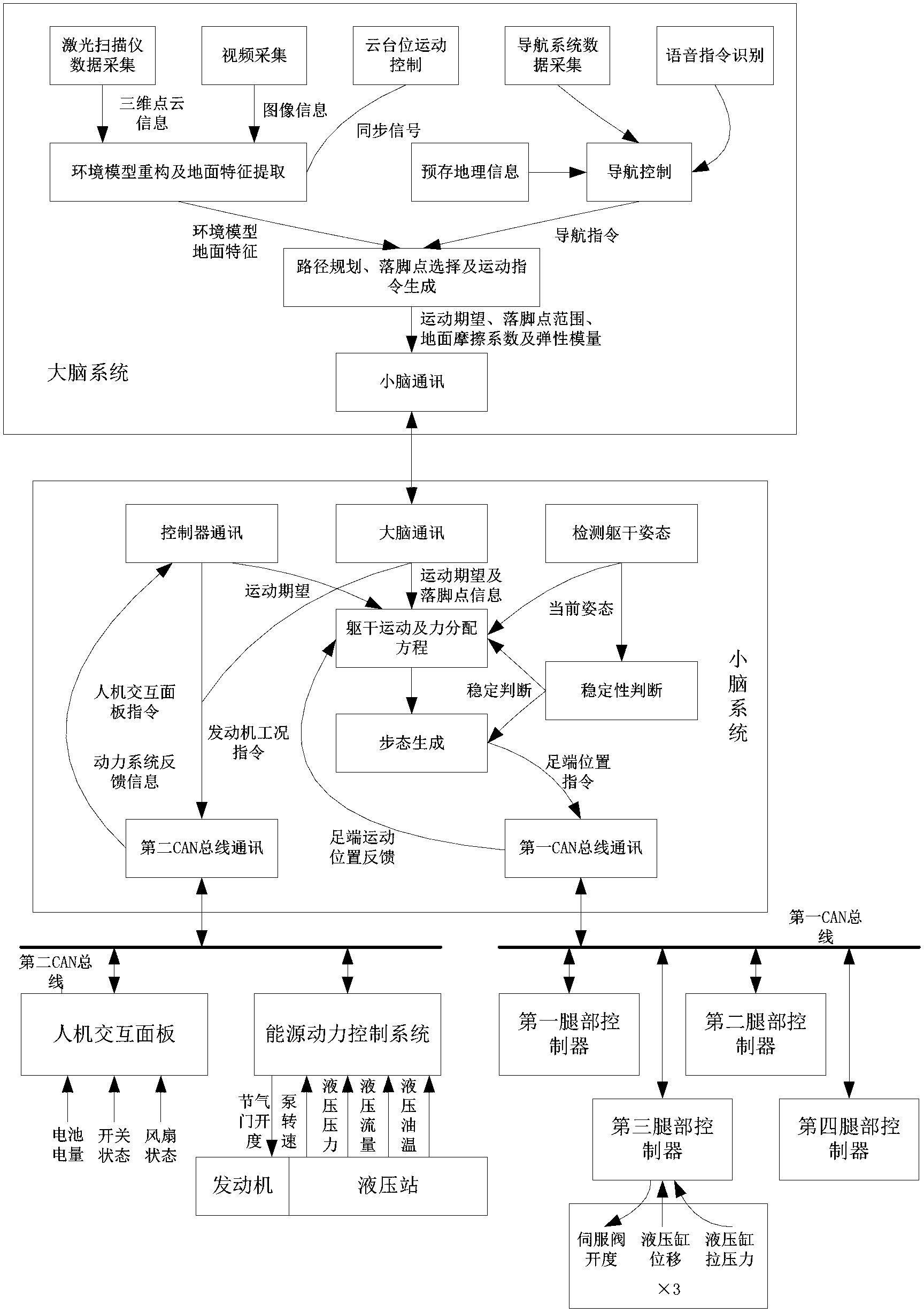
[0048] The division of labor and operation process of each system in the whole control system are as follows: figure 2 shown.
[0049] The brain system is mai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More