

Ship host active-disturbance-rejection controller
A technology of active disturbance rejection controller and ship main engine, which is applied in the direction of adaptive control, ship propulsion, general control system, etc., can solve problems such as instability, nonlinearity, time variation, etc., and achieve fast and high-precision speed in the switching control process , The effect of small throttle adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
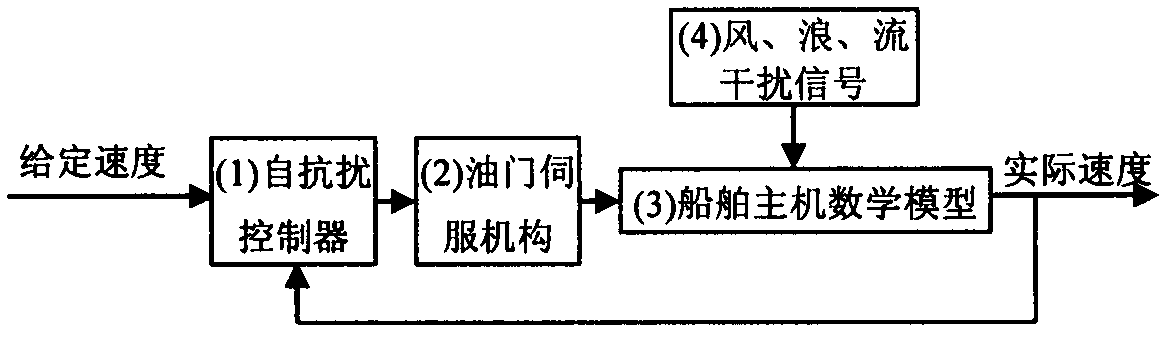
[0040] The digital small ship automatic steering instrument developed by the present invention, such as figure 1 As shown, it mainly includes:
[0041] The controller unit (1) adopts an advanced 32-bit Cortex STM32 series ARM microprocessor, and compares the actual heading signal of the ship detected by the magnetic compass sensor with the given heading signal. If there is a deviation, the yaw angle is obtained. The algorithm generates the rudder angle, and compares it with the actual rudder angle to obtain the deviation of the actual rudder angle to control the rudder, thereby changing the course, and so on, until the deviation between the actual course and the given course signal is zero, and the ship travels according to the specified course the goal of;
[0042] The given heading signal unit (2) is a voltage signal generated by the potentiometer knob, with a voltage range of 0-3.3V, corresponding to a heading of 0-360 degrees, and can be processed through the AD channel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More