

Control method and system for automated manipulator arm
A technology of a robotic arm and a control method, applied in the field of automation, can solve the problems of inability to provide timely feedback, complicated operations, damage to the objects operated by the manipulator, and achieve the effects of improving production efficiency, product quality, and working conditions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0022] A method for controlling an automated mechanical arm, comprising the steps of:
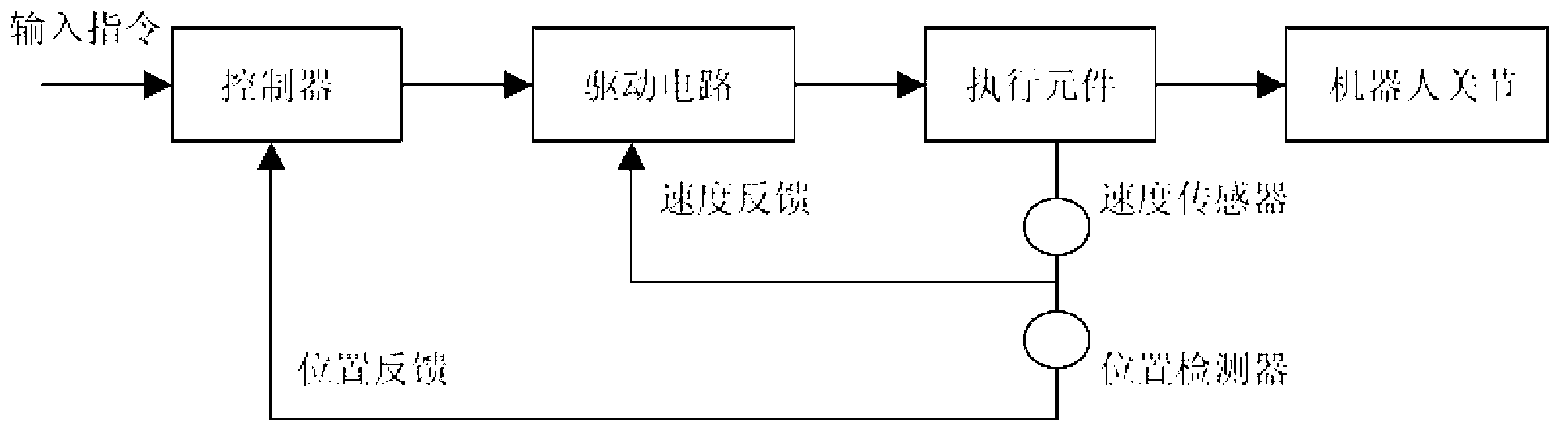
[0023] 1) The body of the robot arm is set, and the actuator, monitoring mechanism and control mechanism are set on the body of the robot arm. The control mechanism includes a PC and a motion control card;
[0024] 2) Set up the LabVIEW software development platform on the PC, and set up the upper layer control software based on the LabVIEW software development platform, as the upper computer, complete the setting of the parameters of the multi-axis movement of the manipulator, complete the non-real-time processing tasks, and realize the coordination of motion control , management and real-time control;
[0025] 3) Connect the motion control card to the PC through the PCI bus, as a lower computer, receive the control signal from the PC and process it in real time, r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More