

Vehicle lower boundary detection method based on multi-sensor fusion
A multi-sensor fusion and boundary detection technology, applied in the field of unmanned vehicle environment perception, can solve the problems that affect the detection of the lower boundary of the vehicle, the inability to recognize the shape and size of the target, and the inability to obtain the position and relative speed information of the target.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0068] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0069] The invention provides a vehicle lower boundary detection method based on multi-sensor fusion, comprising the following steps:
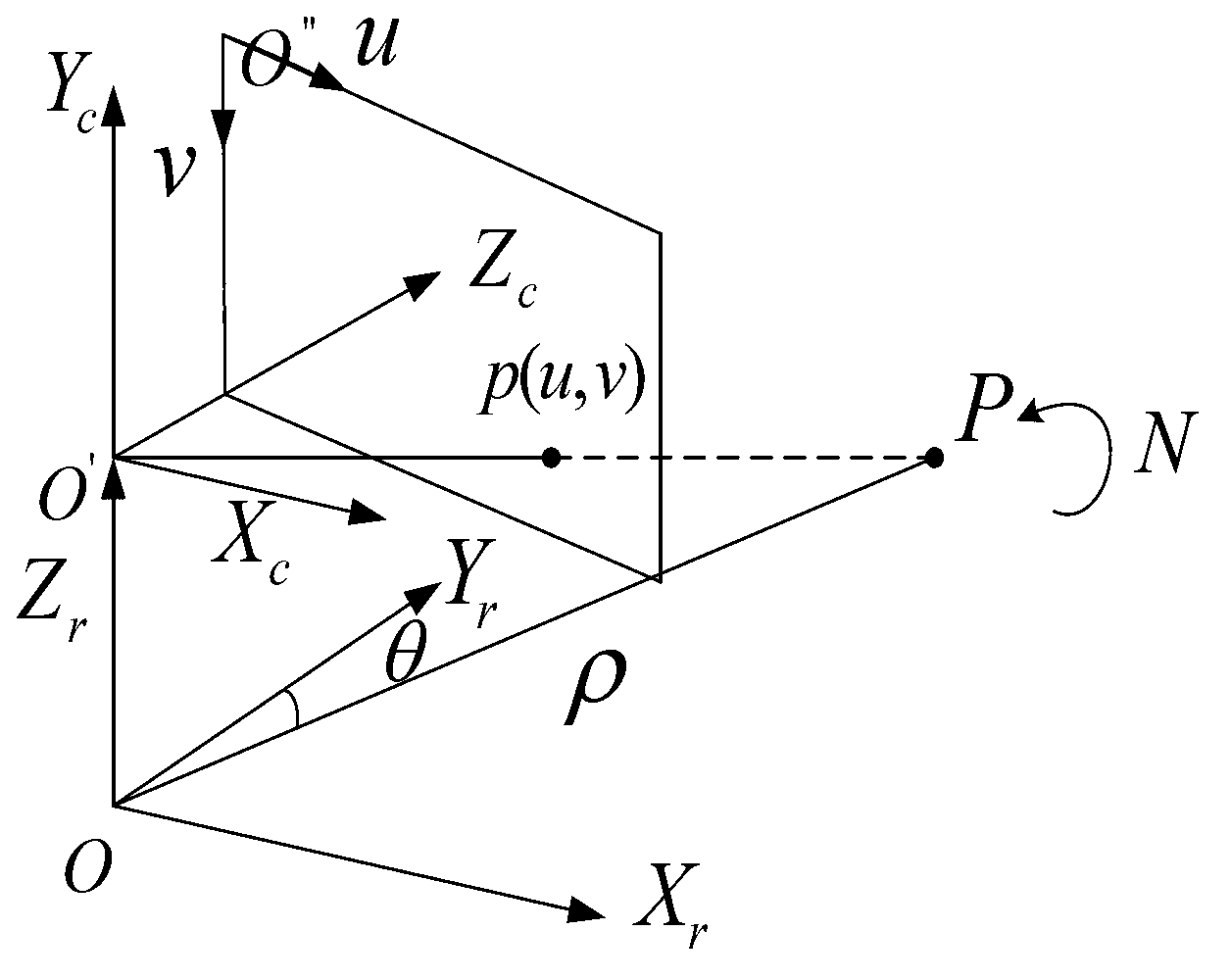
[0070] Step 1. In the same scene, for the target vehicle, use the millimeter wave radar to measure its position, use the camera to collect the image of the target vehicle, and then pass the position information measured by the millimeter wave radar through the space based on the homography transformation matrix The alignment method is projected into the image collected by the camera, and the coordinates of the radar scanning point on the vehicle are converted into coordinates in the camera image coordinate system, which are used as the spatial alignment point (u c , v c ), the specific method is as follows:
[0071] Such as figure 1 Shown, OX r Y r Z r Indicates the rectangular coordinate system of the millimeter-wav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More