

Oil-tea camellia fruit picking method and oil-tea camellia fruit picking robot using same
A technology for picking robots and camellia fruit, which is applied in the directions of picking machines, harvesters, agricultural machinery and implements to achieve the effects of accurate transmission ratio, strong anti-interference ability and suitable precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to more clearly illustrate the technical solutions of the embodiments of the present invention, the following will briefly introduce the accompanying drawings that need to be used in the description of the embodiments. Obviously, the accompanying drawings in the following description are only some embodiments of the present invention. For Those of ordinary skill in the art can also obtain other drawings based on these drawings without making creative efforts.
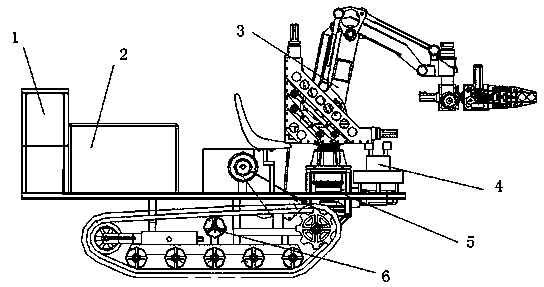
[0041] The invention provides a method for picking camellia oleifera fruit, comprising the following key steps:
[0042] Step 1: Collect information such as the location, size and fruit bearing of camellia oleifera fruit trees through the visual recognition system, and send the collected information back to the control computer;
[0043] Step 2: The control system comprehensively processes the information fed back by the visual recognition system, analyzes and judges the stop position of the camellia ole...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More