

Kinect-based motion sensing-control method for manipulator
A somatosensory control and robotic arm technology, applied in the direction of program control of manipulators, manipulators, mechanical mode conversion, etc., to achieve the effects of reducing casualties, convenient expansion and integration, and friendly interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0046] combine figure 1 ~5, the overall steps of this embodiment are:
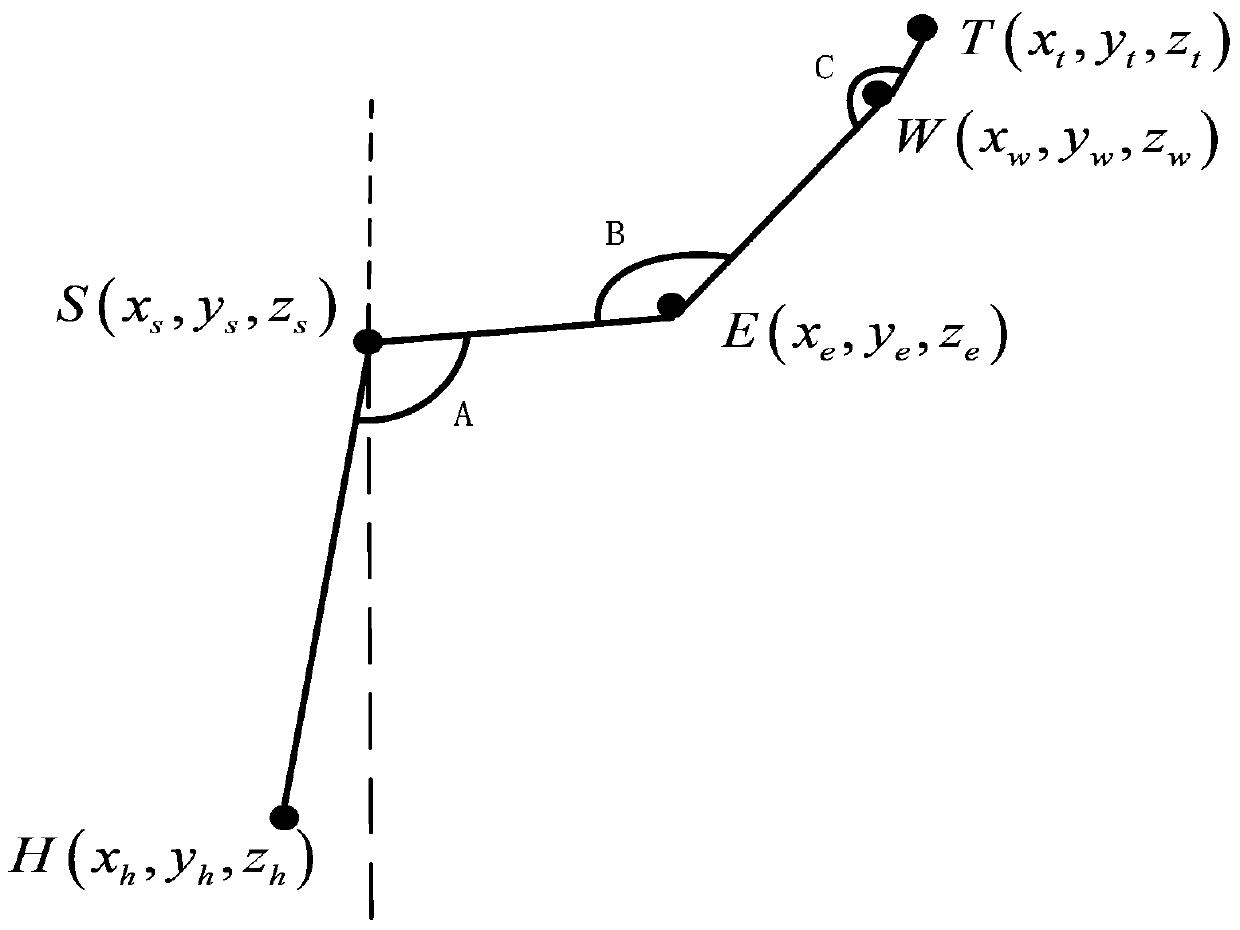
[0047] (1) The three-dimensional coordinates of 20 bone points of the human body are obtained through the Kinect sensor. The joint coordinates mainly used in the experiment include the coordinates of the right hip joint, right shoulder joint, right elbow joint, right wrist joint and right hand joint.
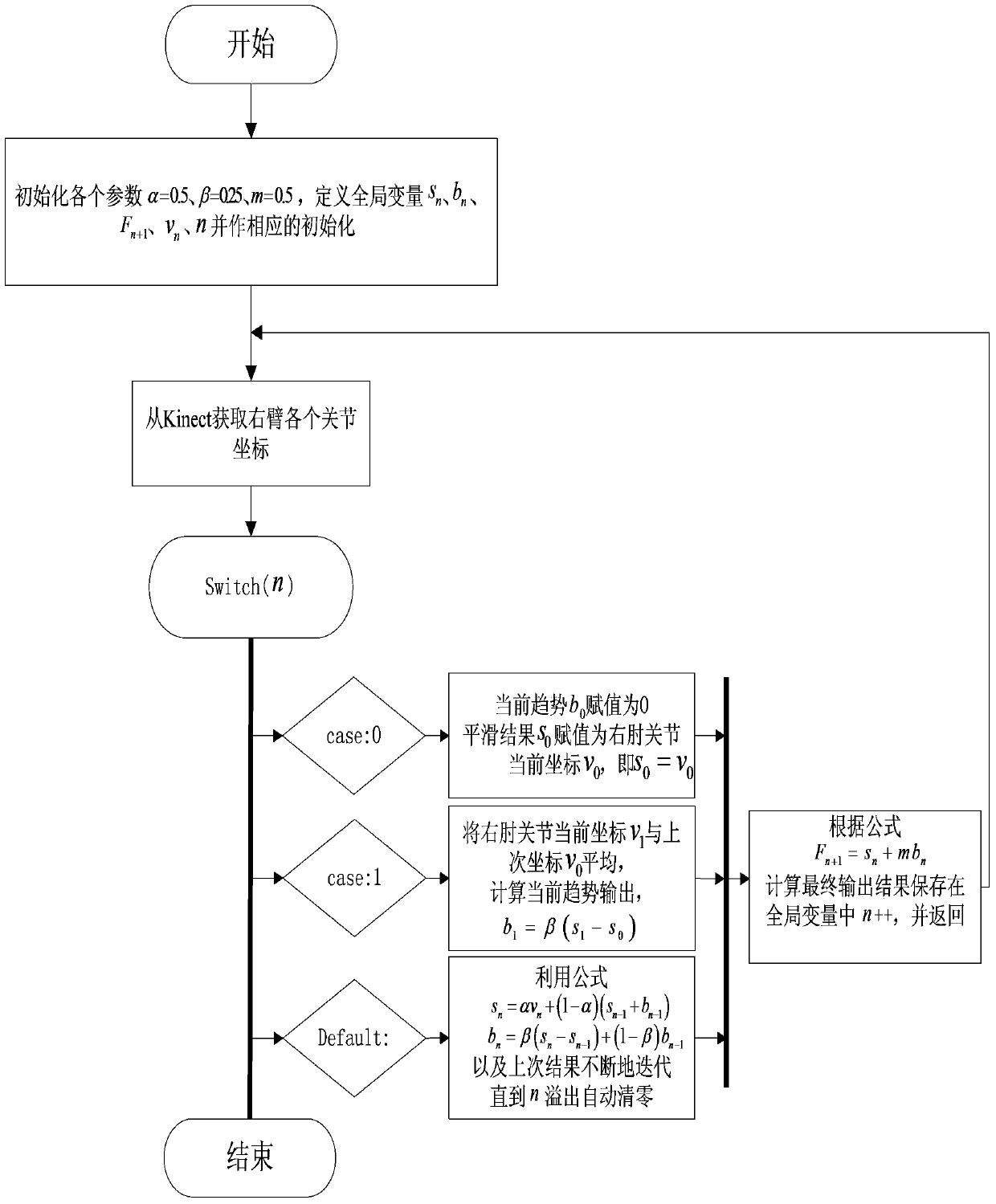
[0048] (2) Use the double exponential filter algorithm to smooth the obtained right arm joint coordinate data to reduce the jitter during the movement of the right arm joint.
[0049] (3) Use the filtered right arm joint coordinates to construct a vector in Kinect's three-dimensional space coordinate system. By calculating the angle between the vectors, you can know the angles at the right arm joints, including the angle at the right shoulder joint and the angle at the right elbow joint. , The angle at the right wrist joint. Save the calculation results;
[0050] (4) Fuse the angle information to form a d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More