

Double-flexible-cable-driven glass curtain wall cleaning robot
A technology for cleaning robots and glass curtain walls, applied in the field of mobile robots, can solve the problems of unstable movement, low work efficiency, low cleaning efficiency, etc., and achieve the effect of improving movement stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific structure and implementation mode of the present invention will be further described below in conjunction with the accompanying drawings.
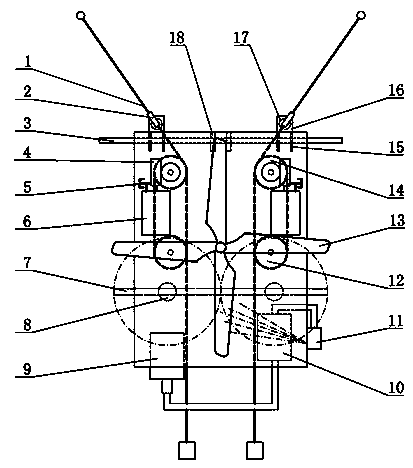
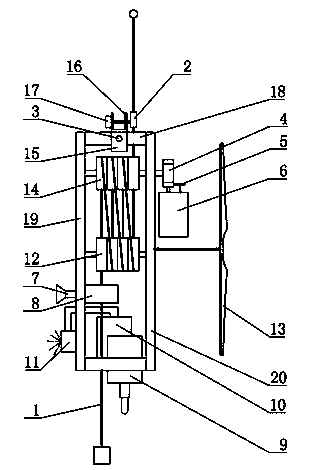
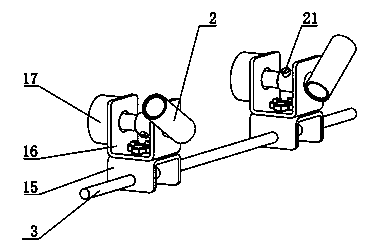
[0032] The double flexible cable drive mechanism that the present invention designs is made up of two flexible cables 1, two groups of wheels and two roller drive motors 6 and two code discs 5. Each group of wheels consists of two grooved rollers with four grooves, including a driving roller 14 and a driven roller 12, the driving roller 14 is on the top and the driven roller 12 is on the bottom, and the two wheel groups are left and right symmetrical. Installed between the front support plate 20 and the rear support plate 19, the two driving rollers 14 are connected to the two roller drive motors 6 respectively, and the roller drive motor 6 is a DC motor with a worm gear reducer 4. The present invention adopts the mode driven by double flexible cables, and one end of two flexible cables 1 is respectively fixed on the tw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More