

Automatic feeding system for aquaculture pond
A pond and automatic technology, applied in fish farming, two-dimensional position/channel control, animal husbandry, etc., can solve the problems of ranging failure, large ranging error, affecting the propagation of sound waves, etc., and achieve accurate orientation. Improve performance, improve positioning accuracy, and prevent the effect of spinning in place
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with accompanying drawing.
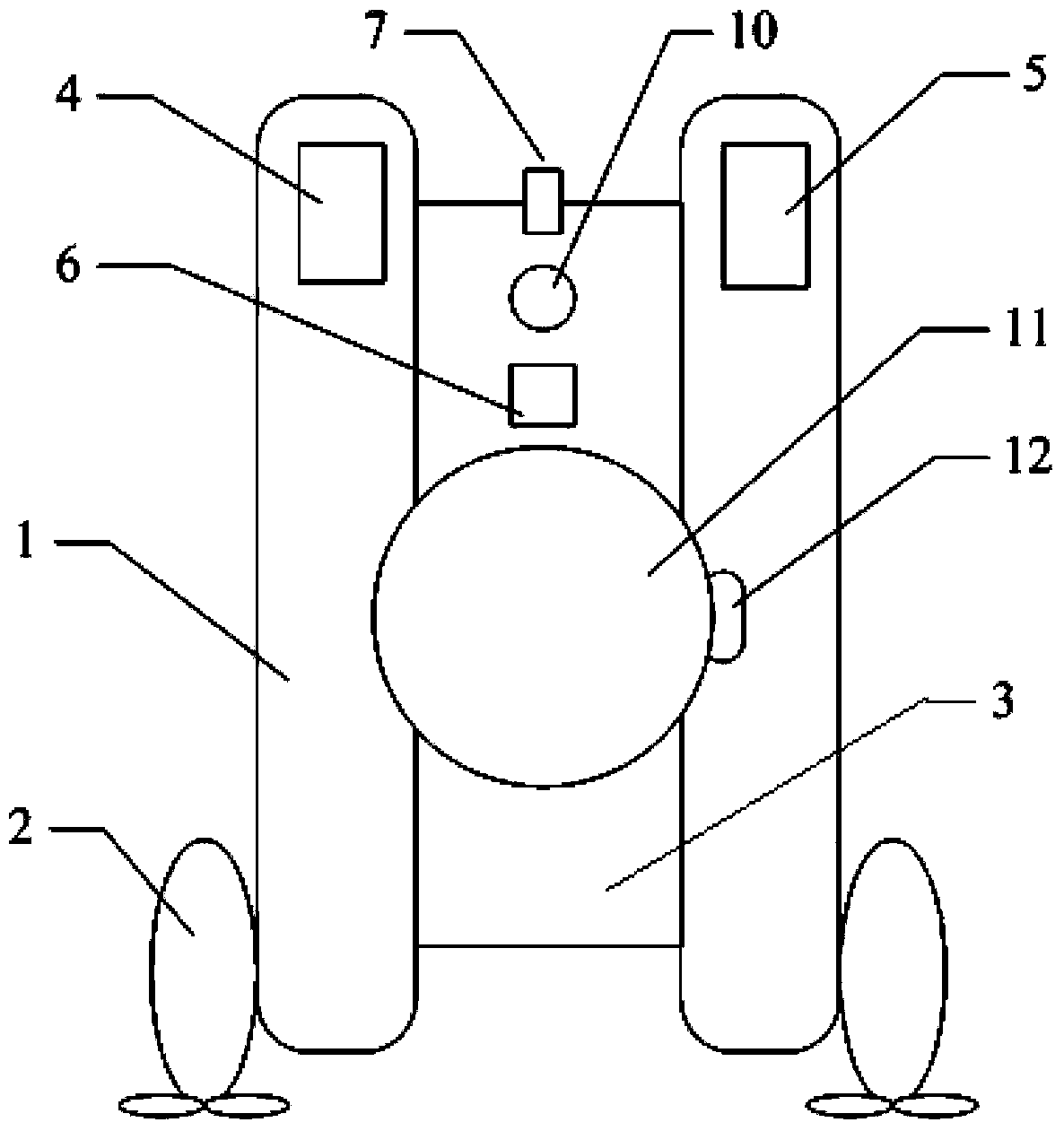
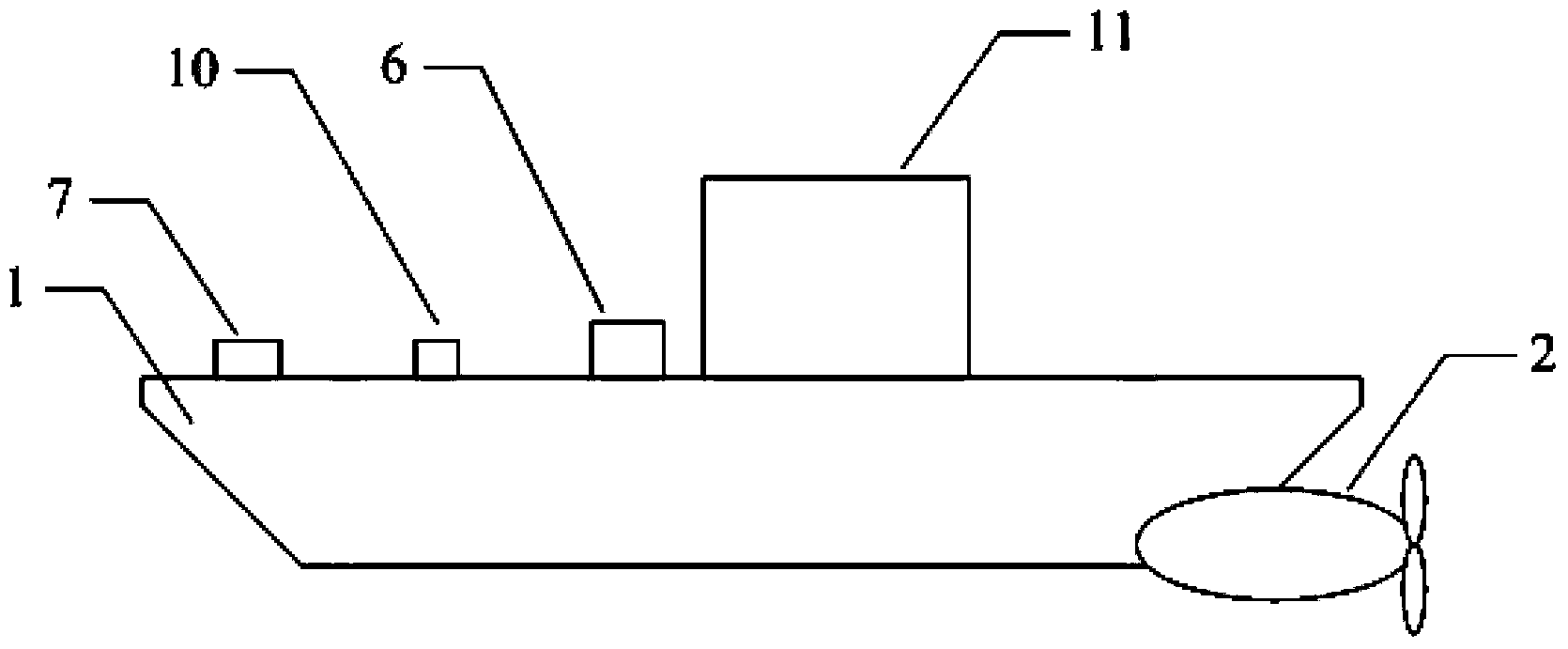
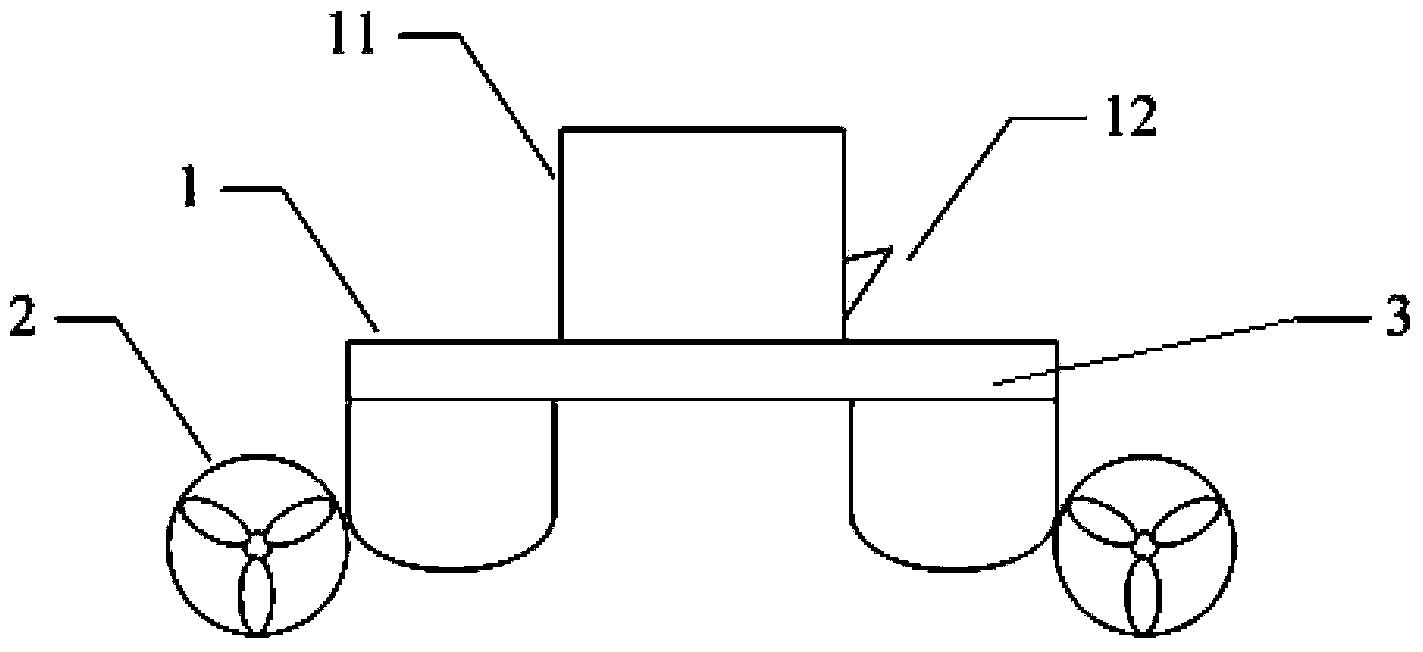
[0050] Figure 1~3 It is a structural diagram of the feeding hull and its load. The feeding hull 1 is a double-hull structure, consisting of two parallel boat-shaped floating bodies floating on the water surface and a deck 3 that covers the two boat-shaped floating bodies and connects the two as a whole; Electronic compass 10, wireless signal receiver 7, controller 6 and feeding machine 11 are installed on the deck 3;
[0051] The control and execution unit of the present invention mainly includes a controller 6 , a wireless signal transmitter, a wireless signal receiver 7 , an electronic compass 10 and a propeller 2 . Two wireless signal transmitters are installed on the base of the pond at intervals, and the electronic compass 10 monitors the instant heading of the feeding hull 1, and feeds back to the controller 6, and the wireless signal receiver 7 receives the wireles...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More