

Removal method for point cloud noise points
A technology of noise points and point clouds, applied in image data processing, instrumentation, computing, etc., can solve problems such as difficulty in determining topological relationships, interference in 3D reconstruction, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
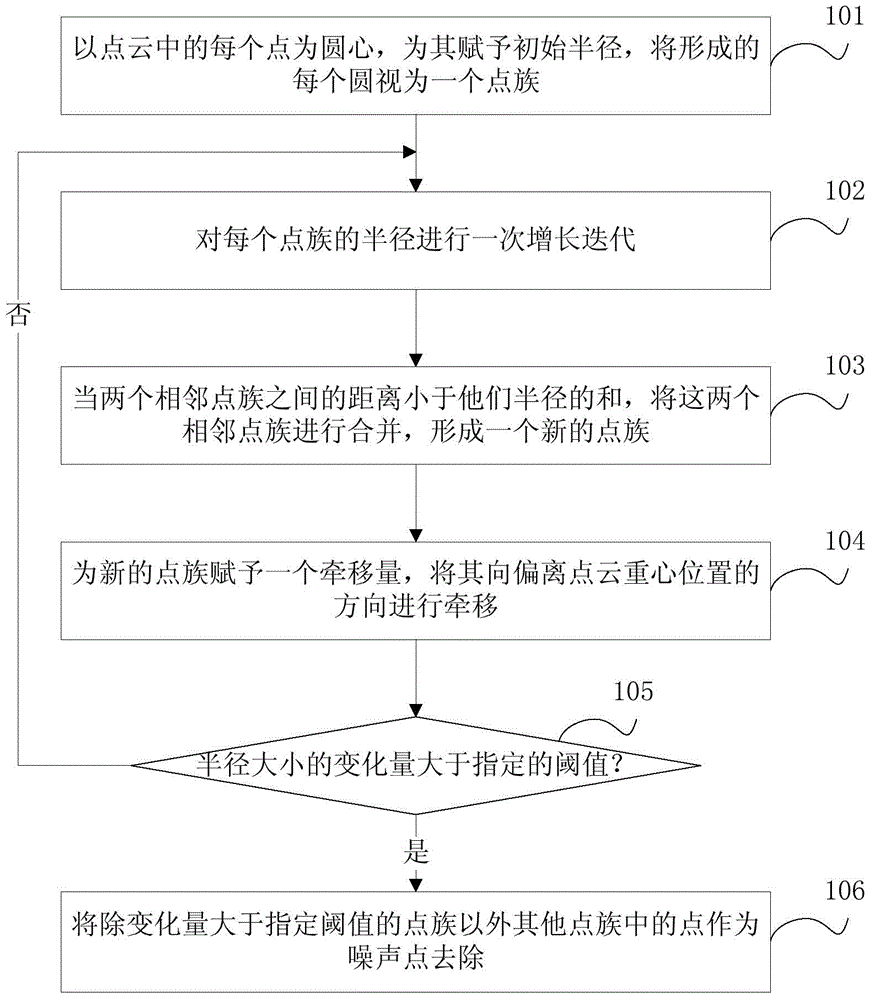
[0044] Embodiment 1. The noise point removal method in the case of two-dimensional point cloud, such as figure 1 shown, including steps:
[0045] Step 101, take each point in the point cloud as the center of the circle, give it an initial radius, and regard each formed circle as a point family.
[0046] Let p be a point of point cloud P, R be the radius value of point p, and the initial value of R is R ini , whose value is:
[0047] R ini = α S max - - - ( 1 )
[0048] Where α is a coefficient related to the point cloud P, generally 0.05, S max is the largest square area covered by the point cloud P, R iniIt is generally a relatively small value. After initialization, each point in the point cloud P corresponds to a circle, and a unique ID is configured for each point in the point c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More