

Orthogonal compensation method for triaxial attitude measurement system non-orthogonal error
A measurement system and non-orthogonal technology, applied in the direction of measuring devices, surveying and navigation, instruments, etc., can solve the problems of reducing the accuracy of calibration compensation, incompleteness, and unrigorous prerequisites, so as to reduce non-orthogonality and The effect of its error and high-precision attitude parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
[0026] Firstly, the basic knowledge of attitude measurement is introduced by taking the accelerometer sensor in the NWT coordinate system as an example.
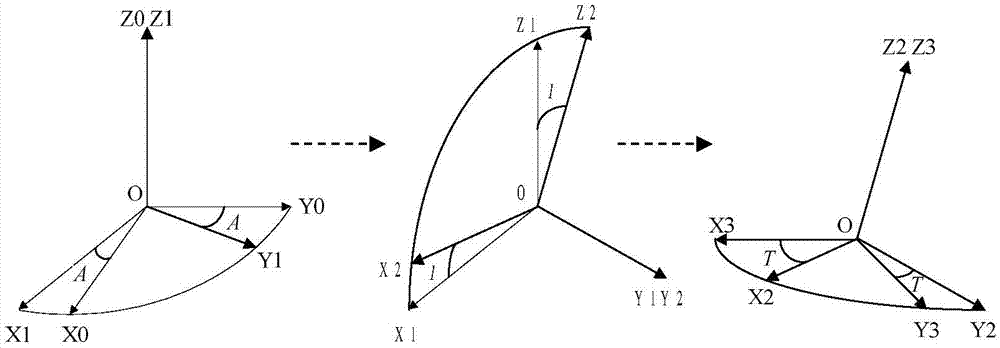
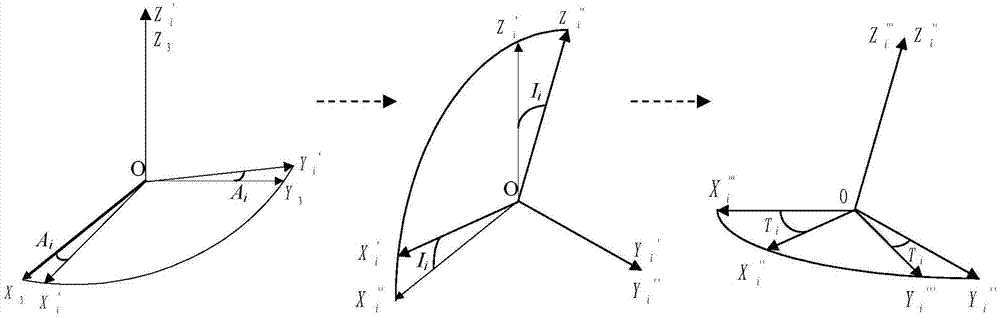
[0027] Establish the initial instrument coordinate system (OXYZ coordinate system) in the ideal geographic coordinate system (North West Sky ONWS coordinate system). The two coordinate systems coincide initially, the N axis points north along the local meridian, the W axis points west along the local latitude, the S axis points to the sky along the local vertical line, the NW plane is the local horizontal plane, and the NS plane is the local meridian plane. Define the azimuth A as the angle of the instrument rotating from geographic north to the projection of the instrument axis on the horizontal plane, the inclination angle I as the angle (acute angle) between the instrument axis and the grav...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More